

单位一直想使用无人船干活,由于我们都没有独立操作过,顾虑比较大,担心我弄不了。我说不用总是不会,万一有问题,微信在线求助厂家指导呗。虽然早有预见,但是碰到了很多出乎意料的问题,多次处于崩溃的边缘。智能无人船不是许多人想象地那样的玩具船,是一个集电气、机械、人工智能、高端装备于一身的综合体,我认为,青岛作为海洋强市,应该依托青岛造船和装备优势,将无人船作为高科技行业来带动人工智能和海洋装备的发展。
1、吊车装船,
装上船以后,从船顶至地面有5m高,可能有些地方不能通过,需要绕行。

到达施工地,发现村中的空中电缆非常多,且高度很多小于5m,因此货车无法通过,只能想办法将无人船通过平板车穿村运到码头,这样吊车也能穿村到达码头

到达码头以后,将船从平板车上吊到码头上以后,开始调试和安装
2、安装和调试
首先将汽油发电机拉起来,给无人船充电。将 船右弦的外接电缆连接,船右弦的旋转按钮,“关”换至“岸电”,开始给UPS充电,UPS是船舶所有电子设备的电源包括多波束和与岸基通讯。给2个遥控器充电:操作遥控器和布防遥控器(主要用来脱钩和抱钩,不用的时候,必须关闭,防止误碰)。
l在岸上(无冷却水)启动发动机最多不超过30秒。
l 发动机启动前注意需将油门旋钮旋至0。
l 在岸上(无冷却水)禁止启动发电机。
l UPS的遥控控制必须在UPS充电状态下才有效,即发电机充电或岸电充电状态。
l 在岸上(无冷却水)禁止启动空调。
l 油门旋钮的操作一定要缓慢微调,切不可迅速旋转至很大值,否则会损伤机器并且非常危险。
l 油门刻度前2格转速上升不明显,第3格之后才会感受到发动机声音变大、动力提升。
l 启动/停止发动机、模式切换等操作时,安全起见最好将油门旋至0再进行其他操作。
然后,打开船左舷的底层电池开关,将遥控器与船体建立无线联系。将遥控器设置为遥控模式,上层模式为自主模式。检查UPS的电量,UPS电量90%,放了四个月,还有这么多电量。

随后,动一下方向舵,看是否可以左右控制。电源开关拨到发电机档位;然后再下放无人艇到水里;下水后用遥控器打开发电机,看能不能打开;然后打开发动机,检查前进和后退功能是否正常,判定正常以后才能将船放开,开出去干活。
l 使用航行遥控器将艇缓慢停靠于母船船舷边,使用专用钩具将艇上的回收绳钩上母船。
l 关闭艇上设备,包括发动机、发电机、空调、测量设备(这些设备的运行需要冷却水冷却,否则会烧坏)
l 使用回收绳将艇的船头船尾固定住,并将锤头落入至槽中。
l 等待锤头完全垂落,吊带很柔软时,使用布放遥控器对接锤头(此过程需要约10秒)。
l 缓慢启动吊机确保抱持机构完全抱紧后,再吊起艇至母船。
l 接好岸电充电线,将充电开关拨至“岸电”,技术人员进入设备舱中读取数据等工作。
l 数据读取结束后请记得关闭UPS,并盖好舱盖。
3、补充:
l 若海况较差船停靠母船晃动较大,为让锤头能准确落入铁槽中,需要将引导绳也钩至母船甲板,然后将锤头通过引导绳引导滑落至铁槽中。
l 艇吊上母船后请检查:艇体有无擦碰、割破,艇底部和测量设备有无破损; 可以通过喷泵底部格栅观察喷泵内部叶片有无垃圾、渔网缠绕,若有需要及时清理;
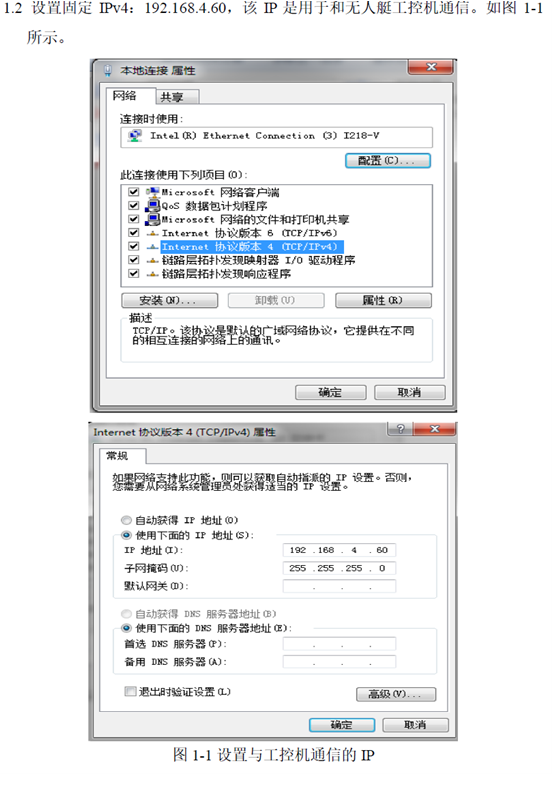
控制电脑的设置:一般已经设置好,第一次设置时,需要将
1) MBR的天线连接到主机
2) 将电脑的网线和MBR的网线用HUB连接起来,MBR已经组建了无线服务器,需要将第三方设备逐一增加才能实现各设备之间的通讯
其中电脑的增加方法如下
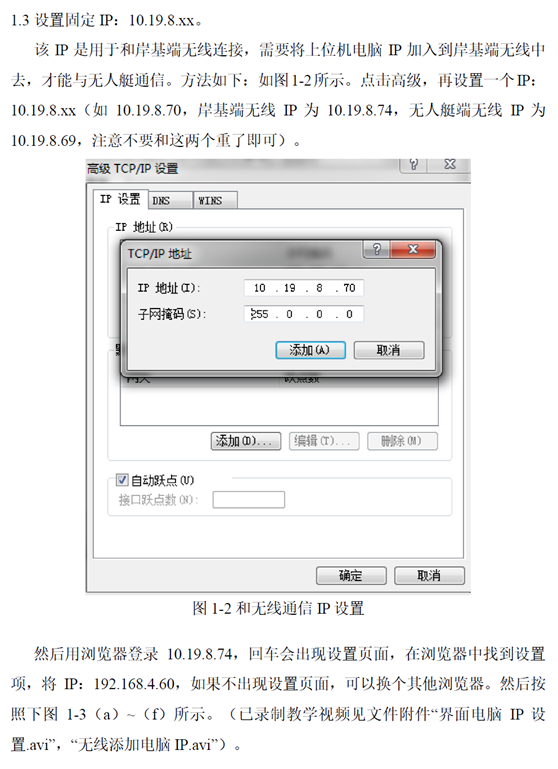
然后增加电脑至MBR的无线网络中
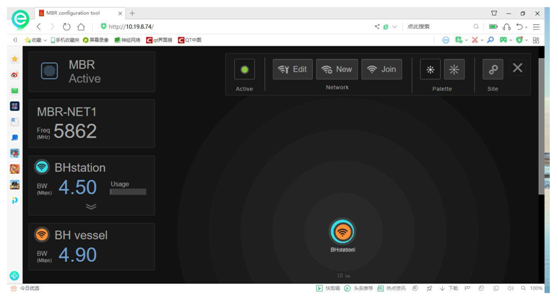
今天增加了以后,监控可以启动,但是导航界面的左上角2个按钮:航控和遥感是红色,求助了程和胡,检查了config文件,没有问题,重启了UPS,正常了
那么,如果要监控多波束和声纳,电脑也必须连接至HUB中,且加入到MBR的无线通讯服务中.
声纳主机保持开机状态,但是加电必须通过无人船的显示控制界面来控制,用万用电表测了,确实没有电。
天黑了,就没有给声纳主机家电,只能明天在尝试。
无人艇作业结束,关掉一切必须关掉的设备:比如空调,多波束换能器,