
1、工控机未启动
厂家胡博士和吴博士从中午开始维修,先是昨日的问题重现了一下,然后用自己的电脑再试一下,问题一样,那么问题肯定在船舶上;怀疑是工控机没有启动,重启UPS,仍然有问题,打开中间的长方形大舱盖,检查工控机。用键盘和鼠标,连接到工控机,发现是工控机启动一半卡住了,说是硬盘出问题,需要修复一下。
工控机启动以后,电脑就可以控制船舶,发送油门和航迹正常,从状态栏的转速就可以看出,油门发送成功,但是状态栏不能更新了油门参数,油门一直是0.0%。胡博士将激光雷达的开关功能放在主界面上了,但是仍然有一个问题:比如,如果激光雷达关闭的时候,尚有故障,那么这个故障就不能清除;为了保证激光雷达的正常,可以先退到没有障碍物的水域,然后关闭,就可以手动控制了。胡博士继续解决激光雷达关闭以后,不能清除残留障碍物的问题。
升级失败,回退到昨天的状态,为了保证激光雷达的正常,可以先退到没有障碍物的水域,然后关闭,就可以手动控制了。开启和关闭有一段延时,约1分钟。
2、一切正常
设备总算一切正常,开始干活。

3、搁浅
由于测区北边和天线之间有个岬角,中间还搬了一次家,搬到岬角上。
今天测岸边的时候,不小心上礁石堆里了,回来的时候,发现有些损坏,所以最好在天气好的时候干,即使碰到什么东西或者搁浅,也不会有什么危险。

和租船的人要了滑石粉、树脂、凝固剂和增强剂,准备补补船

4、寻找放船点
1) 最好是码头,吊车能过去
2) 离测区越近越好,不能超过10km
3) 天线与船之间没有遮挡
跑了一下午,找了附近的大码头,但是离测区有8km,距离较远,后来在防潮堤找了一个水闸,高潮的时候,还可以。但是低潮不行 。

这个地方只能是高潮进出,而两个高潮之间的时间是12个小时,天肯定黑了,因此不可行,看来还是要走大码头,任何时候都能回来。 现在就是距离较远,必须租船将无人船拉到测区,然后用电脑控制,随后在大码头附近找了一条船,约好明天早上6点出发

5、糟心的一天
今天早上将船从堤坝边吊出去,然后用绳子牵到租船边,拖到测区由于UPS只有在充电状态下才能用遥控器启动,这真是一个让人无语的设定啊。后来,在岸上用发电机用电缆联到船上,用遥控器启动了UPS。现在想起来,这样是不对的,步骤应该是这样的:
1) 先在岸上将底层电池开关打开,与遥控器建立联系,如果不能,重启开关
2) 然后将船吊装至水中,将UPS充电打到船电
3) 遥控器启动发电机
4) 遥控器启动UPS(充电状态下遥控器才能遥控启动UPS)
等潮水到了平潮,开始干活,由于水比较浅,有的地方可能搁住了,不过大部分都趟过了,这样会造成海底的垃圾缠绕至螺旋桨的主轴上,干了约2小时后,通讯中断,开船过去看了,发现发动机已经熄火了,冒着黑烟,而且将船舱都熏黑了,发动机的排烟管也坏了,发动机上的淡水箱也干了,机舱里也进了水,可能是从排烟口倒灌进去的,

发现之前船体碰坏的小地方滴答滴答的,上海大学说可能是船体玻璃钢里水渗出来的,不应该是船舱漏出来的。
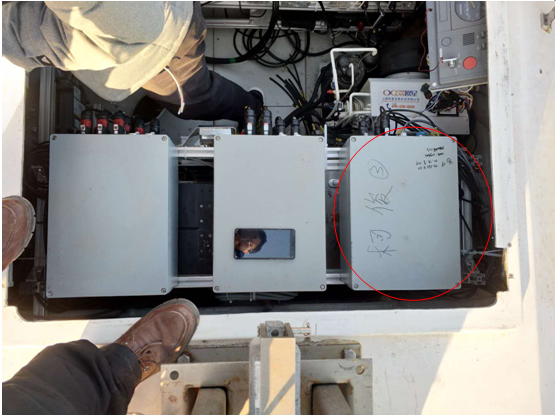
所幸的是发动机和发电机还能开启,后来船厂沟通一下,需要大保养了我检查了设备舱,也被熏黑了,UPS充电器故障,无法开机,查了多波束/声纳都没有问题,看来明天必须用船拖着跑了,用外置发电机给设备通电,把活干完。
6、处理效果
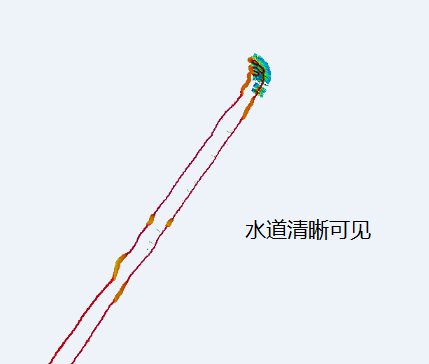
用caris软件处理采集的多波束数据,比起单波束,多波束的效果非常明显,比如下图的潮汐水道在多波束上清晰可见,若是单波束还需要结合多条测线进行判断,
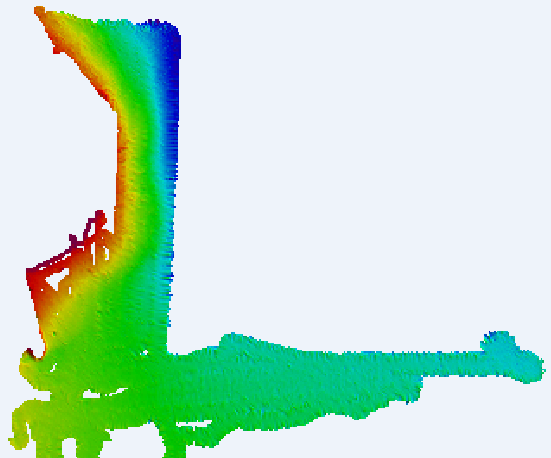
无人船的多波束的主要问题是:生成的小格网(1-2m),波束的姿态不稳定,可能是无人船晃动的频率快,而姿态数据更新不及时造成的,但是大格网(5-10m)效果还不错,比如下图:
7、总结
这次独立操作无人船的经历让我们基本掌握了这款无人船的使用,教训也比较深刻:以前我们碰到柴油机都躲着走,现在也要主动去了解它,会监控它的状态,会根据情况作出合理的反应。在无人化和智能化的浪潮下,掌握和使用无人设备是我们海洋从业者必须具备的素质,不但要会使用,而且还要能参入进去,迎接新浪潮的洗礼。