
由Yvan Petillot教授领导,由来自 赫里奥特-瓦特大学 爱丁堡正在努力寻找可靠的机器人解决方案,用于海底结构的检查和维护 ;
他们的具体重点在于克服水下环境在表面清洁、检查和无损检测(NDT)操作过程中常见的具有挑战性和不可预测性的因素。典型的挑战包括由于洋流导致的ROV或操纵器的不稳定和移动,对相关结构或工具造成不利影响和损坏,以及由于与表面的接触损失而导致的低效检查 ;
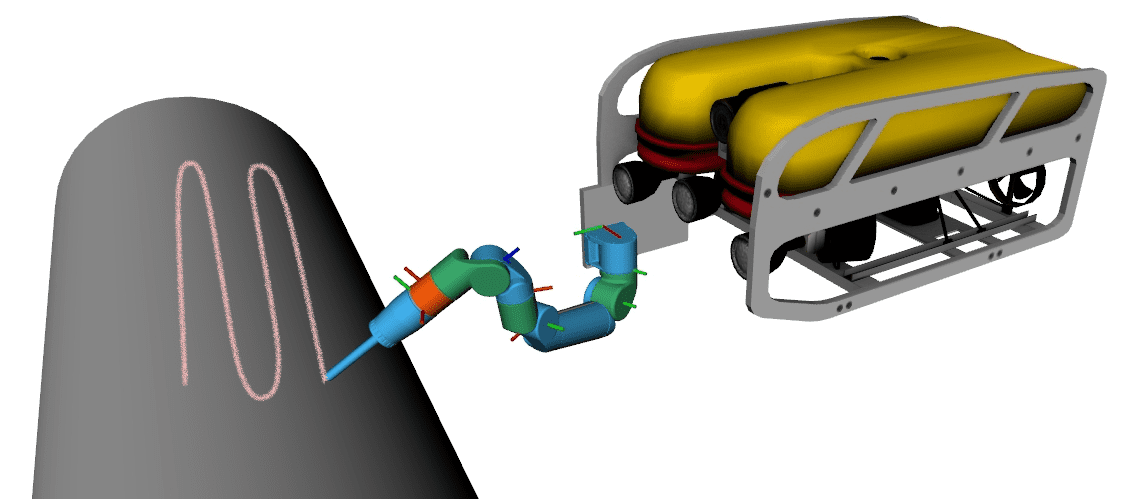
为了测试和启用他们的工作,HWU团队一直在使用Reach Robotics Reach Bravo 7功能机械手, 附有 力/扭矩传感器 在机械臂的手腕处。来自该传感器的反馈促进了控制器的实现,该控制器被设计为在跟踪轮廓表面并将接触损失最小化的同时保持所需力的一致性 ;
控制器将遥控潜水器的动态移动范围与 机械臂 ’6自由度(DOF),以自主配置系统的最佳轨迹,从而在与表面相互作用时保持所需的力。当在现实世界或现场环境中进行海上结构物的维护操作时,这一功能将非常有益 ;
Reach Bravo 7专为检查级车辆设计,其灵活性和力/扭矩传感器的精确数据反馈使其成为海底作业的强大操纵、干预和检查工具。用他们自己的话来说,HWU的研究人员将Bravo 7机器人机械手描述为“在水下场景中提供平稳、敏捷和准确的运动”,帮助他们实现在水下干预空间的抱负 ;
Reach Robotics致力于继续支持机器人研究和水下景观干预能力的进步。HWU团队正在进行的开发最终将在海底维护操作中取得更大的成功 ;
计划在没有先验知识和表面结构视觉的情况下与之交互。 “


所有图像均由HWU提供