An abridged version of this case study first appeared in ON&T’s September 2023 issue.
Diving Survey & Marine Contracting (DSMC) carry out a range of specialist subsea services, including commercial diving, the operation of remotely operated vehicles (ROVs), and hydrographic survey campaigns. Since 2021, they have used Reach Robotics underwater electric manipulators to execute a range of subsea inspection techniques, including Ultrasonic Wall Thickness (UT) and Cathodic Protection Potential (CP).
DSMC own and operate a fibre optic, electric SAAB Seaeye Falcon ROV. They had previously used a Reach Robotics Alpha manipulator with corresponding Master Arm and understood its capability value for smaller ‘suitcase’ ROVs. Deciding to put the larger and more capable Bravo manipulator system to the test with their Falcon was a natural next step, and according to Charlie Bayston, Managing Director of DSMC, one that “fundamentally changed the capability of the Falcon.”
We approached Charlie to discuss the projects that ensued and how DSMC have used Reach Bravo manipulators to effectively replace divers and conduct increasingly complex inspection activities with portable underwater vehicle manipulator systems (UVMS). The following is his first-hand account of a sensor recovery project using Bravo robotic arms that changed DSMC’s approach to remote operation.
SUCCESSFUL SENSORY RECOVERY MISSION: FIRST-HAND FROM CHARLIE BAYSTON, Managing Directorof DSMC
“In early 2022, an offshore wind developer client required DSMC to install telemetry equipment in reasonably deep waters using divers. This equipment was secured with bolts fastened to 60Nm. Later that same year, we were asked to recover this equipment. We decided that using two Reach Bravo manipulators was a safer and arguably more efficient alternative to putting divers back into the water.
The client agreed and provided a budget for workshop trials and training before deploying offshore. If successful, it would mean completing the works diver-less, with operations carried out by a small team aboard one of the client’s vessels. Not only would this lead to a significant cost saving but it would spotlight a new and pioneering level of capability from an inspection-class ROV.
FITTING AN ROV FOR PURPOSE
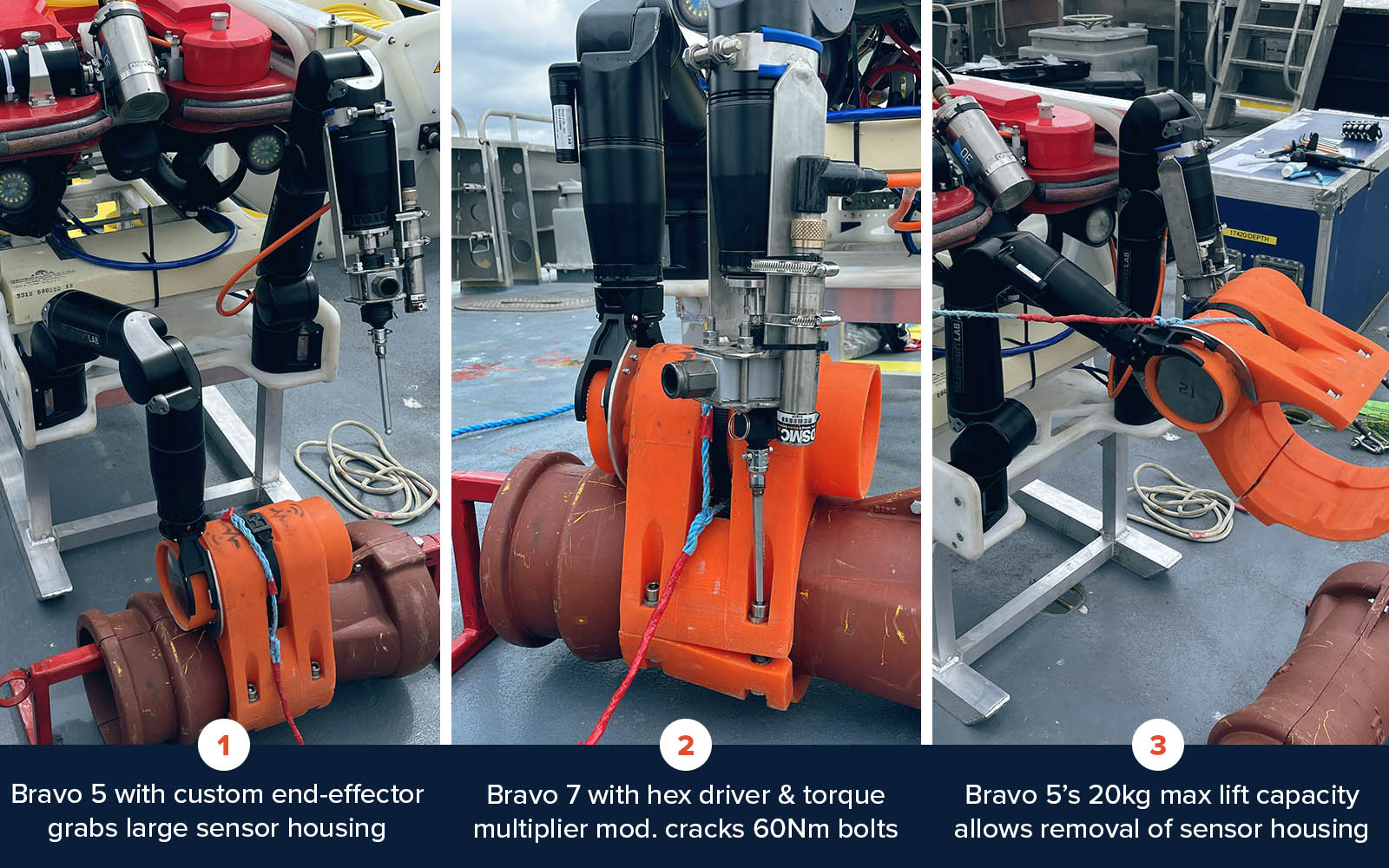
The ROV would need two ‘hands’. One to grab the sensor, steady the machine for a delicate operation in strong tide and then carry the removed sensor housing to the surface. The second arm needed to be more dexterous and modified to wield a rotational hex-drive tool, driven by the rotating wrist to unfasten the bolts.
There were several engineering challenges. First, we needed to modify the manipulator jaws to be able to grab around the large sensor housing. Second, we had to mount the hex driver to the end of a manipulator. The third hurdle was figuring out a way to increase the torque in the manipulator’s constant rotating wrist to crack bolts tightened to 60Nm. Last, but not least, was the requirement to balance the ROV with additional buoyancy, to account for the extra equipment and heavy sensor, allowing it to fly and navigate in a tidal environment.
When we explained what we wanted to do, as always Reach Robotics were up for working with us on the challenge and so our in-house fabricator got to work.
The most prominent modification was a mount that clamped to the manipulator’s forearm and held a torque multiplier. This was operated by the wrist joint of the Reach Bravo. We traded speed and gained an increase in the torque to 100Nm. The tool worked brilliantly, and so it was off to trials and in-water testing!
FROM TEST TANK TO OPS DECK
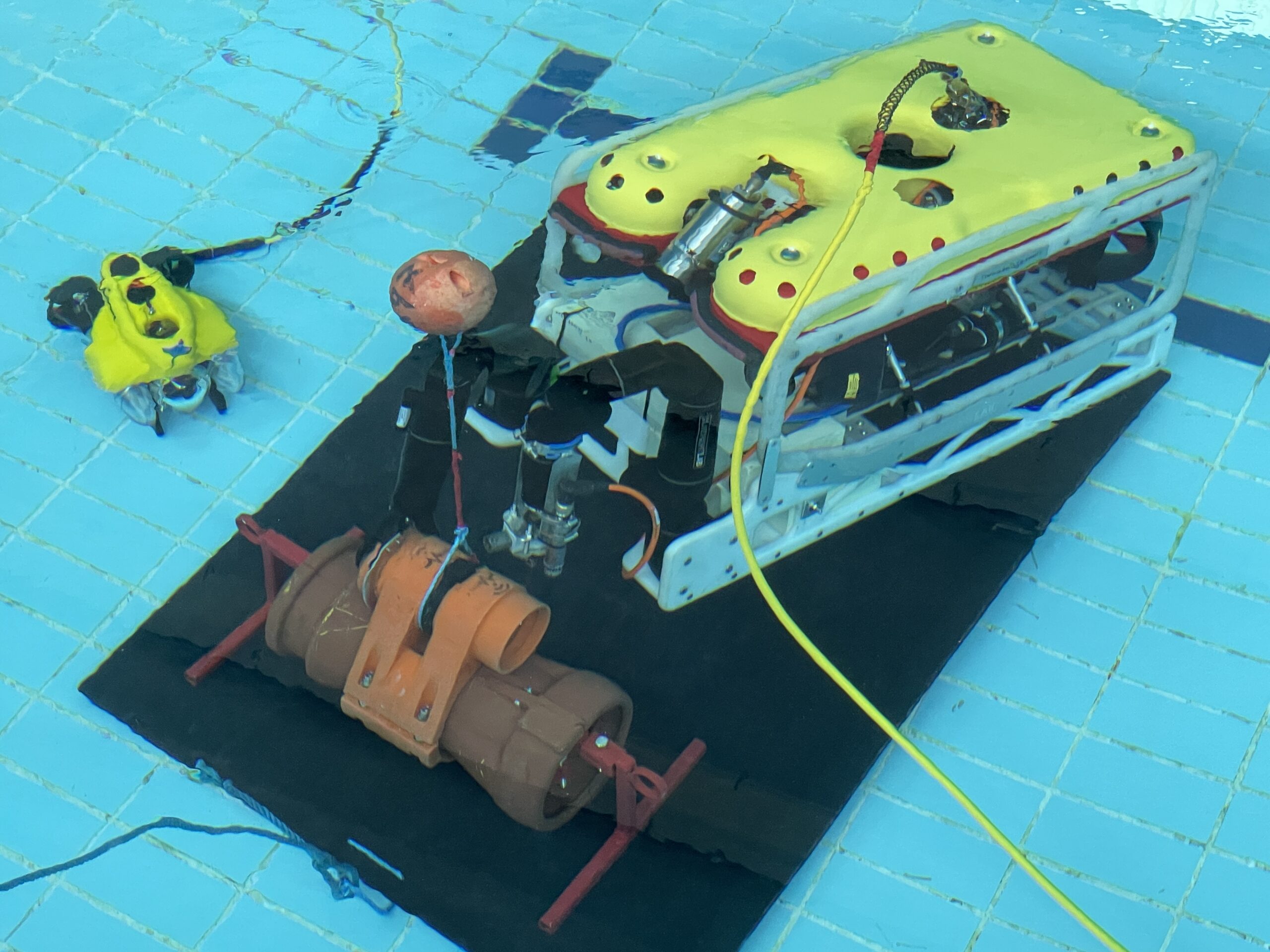
We decided to collaborate with Upper Wharfdale School, in North Yorkshire, UK, to conduct some in-water training in their swimming pool—our test tank. This allowed us to demonstrate the system to some of the students who were keen to help us with the trials and learn about the subsea robotics industry. After a few lessons learned in the pool (positioning buoyancy is a fine art!) we ran some further checks of the system including testing the Reach Bravo’s lift capacity.
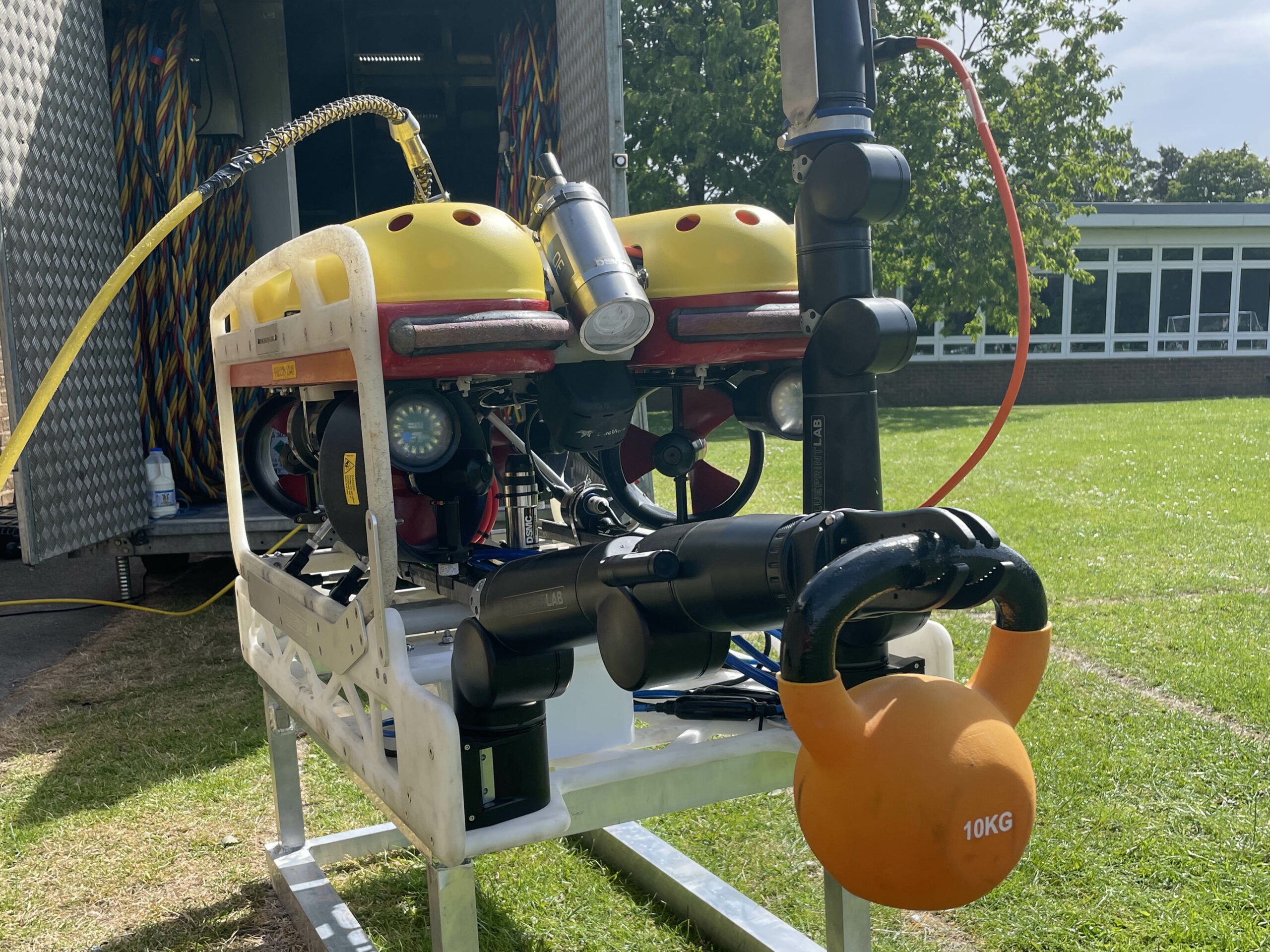
We were delighted to discover that the manipulator could not only hold 10+ kg at full extent, but that it could lift much heavier weights (we used 20 kg) by limiting its range of movement. Confident in the tooling configuration, we set a date for offshore mobilization, and our coordinates to recover the telemetry equipment.
DSMC Pool Trialsto test the complete solution
Bravo 5 weight-lift trials: 10kg max at full extension
THE OUTCOME
We successfully unbolted and recovered both sensors within one shift, significantly quicker than we had hoped. Since then, we’ve continued to use the Reach Bravo to change and enhance how we operate below the water.”
~ Charlie Bayston, Managing Director DSMC
Mission success with the Falcon ROV and dual Reach Bravo integration
DSMCs willingness to trial new technologies, develop custom solutions and embrace diver-less intervention has multiplied their remote operation capability. As Charlie mentions, DSMC have continued to find success with their Bravo manipulation systems, including a complex project involving pipe-cleaning and taking CP readings underwater. Keep an eye our on our social media for the follow-up story in November!
If you would like more information on any of our Reach Bravo manipulators, please contact [email protected] OR request a quote today.
For more information about DSMC, visit www.dsmc.uk.