

航次结束了快2个月,一直没有时间写本航次的总结,主要原因是自己承担的任务要验收,费了好大的劲,才将数据处理成验收单位所需要的,所幸现在应该是没有问题了,符合专项的要求了。航次期间,由于还有复习岩土考试,每天睡5-6个小时,硬啃了重磁方面的教材,集中精力突破了重磁处理的瓶颈,发现只要逼迫一些自己,自己还是有一定的潜力的。言归正卷,本航次的外业,我参与的不是很多,但是遇到了一些小问题,有必要做一下总结。
1、多波束的参数设置和效率问题
在之前的文章中,我已经做了一些试验,并且给出了推荐的参数。在检查参数的过程中,不知谁给改了,因为如果使用推荐参数,效果很明显。
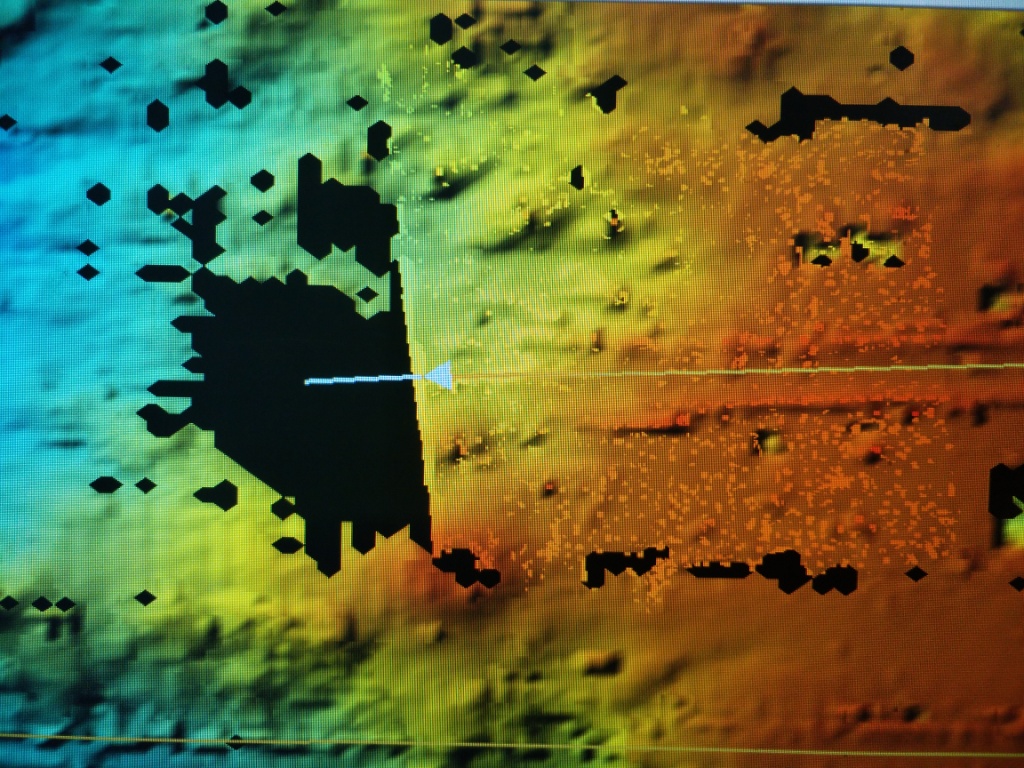
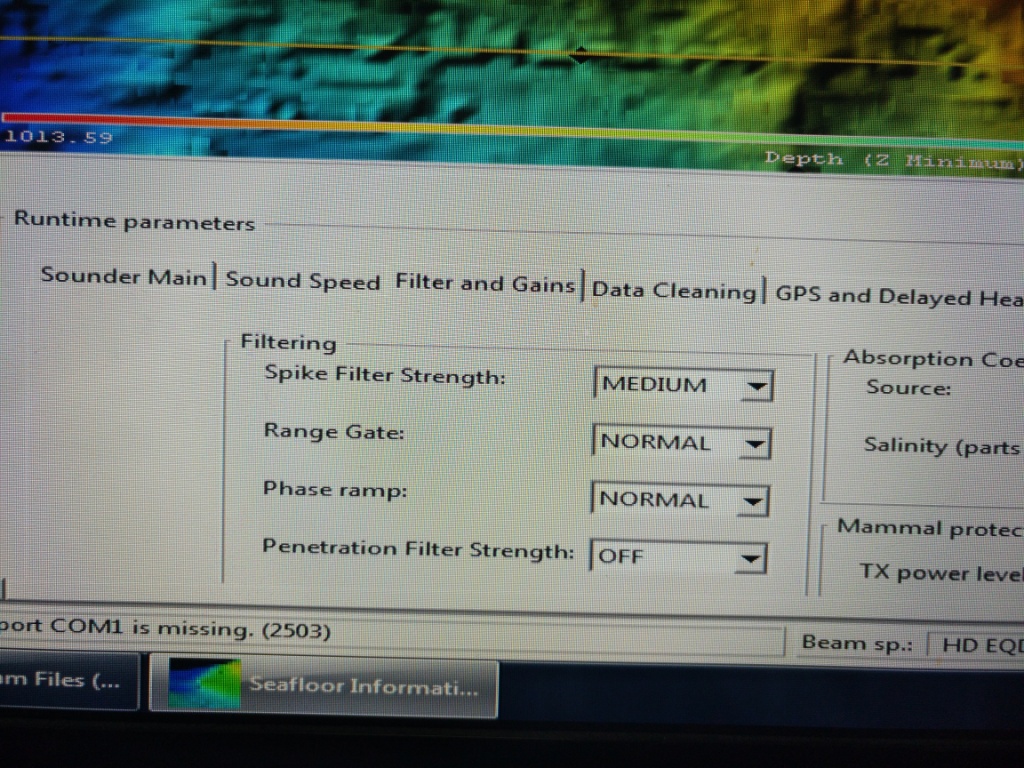
上图使用推荐的参数,效果立马变好,中央的两条梗马上就好了。
在本航次使用的多波束的过程中,由于海区海况恶劣,十分担心多波束的效率即覆盖问题。在大副想排掉前舱压载水提高速度的时候,我们的任师傅发现多波束效果变差,跟首席和领队汇报了以后,我们开始反向操作,加载压仓水,多波束的覆盖更加好了,虽然牺牲了一点点的速度,但是效率大幅提升。这个发现,可以说为我们节省了不少时间,为单位省下上百万。魔鬼就藏在细节中。
2、回收浮球遇险情
在回收浮球的过程中,我们之前的操作时,在船头回收,浮球在船侧,不过没有勾上,再次靠近,挂钩。但是,上个航次,他们又采用船侧回收,效果也不错,就是在船头挂钩,然后拉到船中侧,回收,好处就是作业面大,不用搬浮球。第一次回收很顺利,但是第二次回收的时候,由于绳子进到船底,被海蛎子挂住,无论是倒车还是加车绳子都不能脱落。
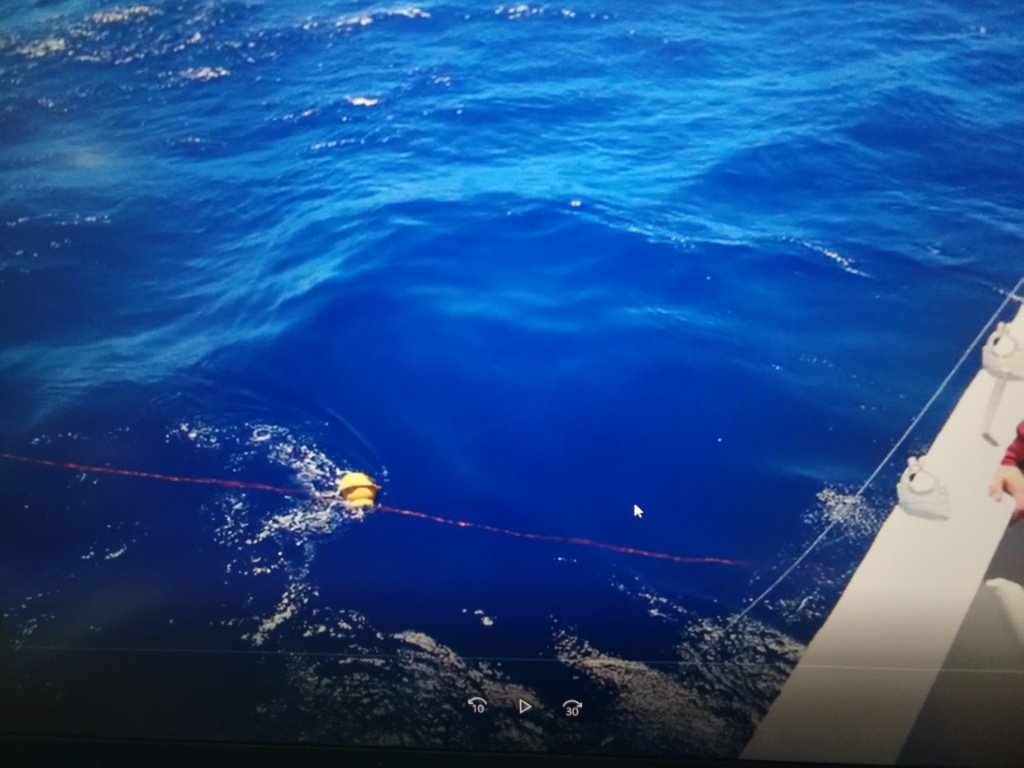


最后采用的办法,就是分别拉住两边的浮球,然后先割掉一遍的绳子,然后拉到船中侧,拉起设备,然后再拉起另一边,费了不少时间。
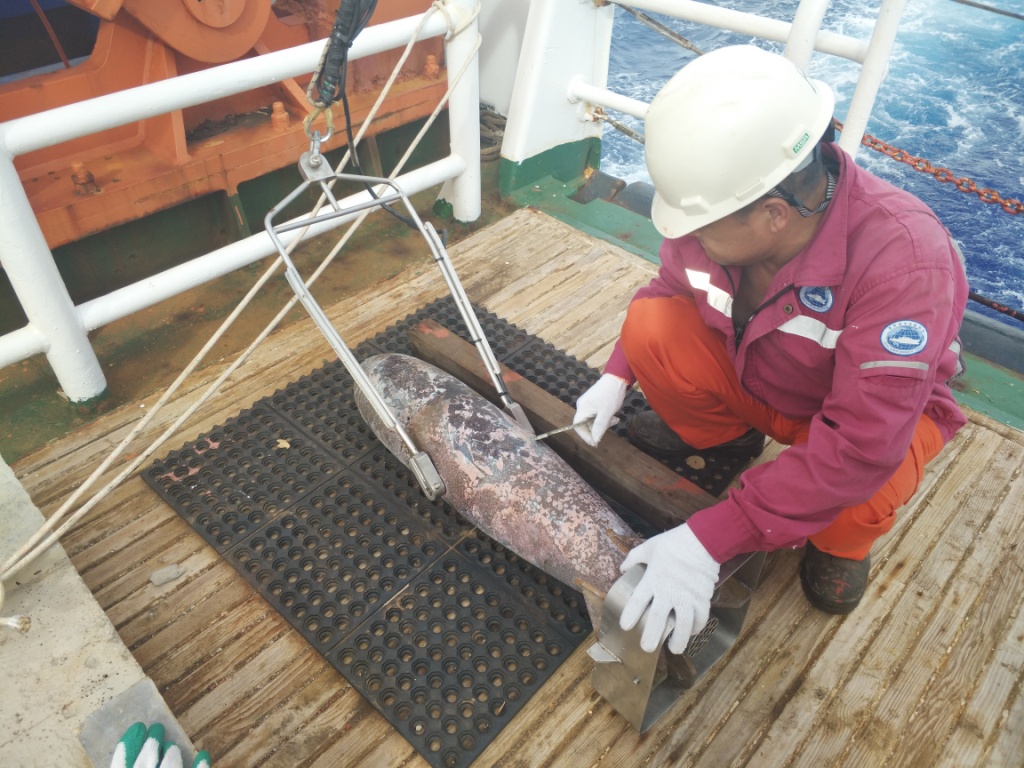
3、MVP的试验
之前航次同事试过MVP(走航式多参数剖面测量系统),对于地球物理航次来说,主要是声速剖面的测量,它的下放和回收的速度比CTD绞车快很多,而且还可以走航测量。但是走航测量深度就不够深,有可能影响后拖设备。
(1)连接拖鱼:

刚开始是2,3即连上拖鱼后,下水后为2,2,就可以去室内发指令;
mvp连接拖鱼时,必须关闭电源,不能热插拨
放的时候,绳仿佛躺在水面上,下去没有那么快, 8.5节速度,1600m时,近700m深度,收的时候绷紧。
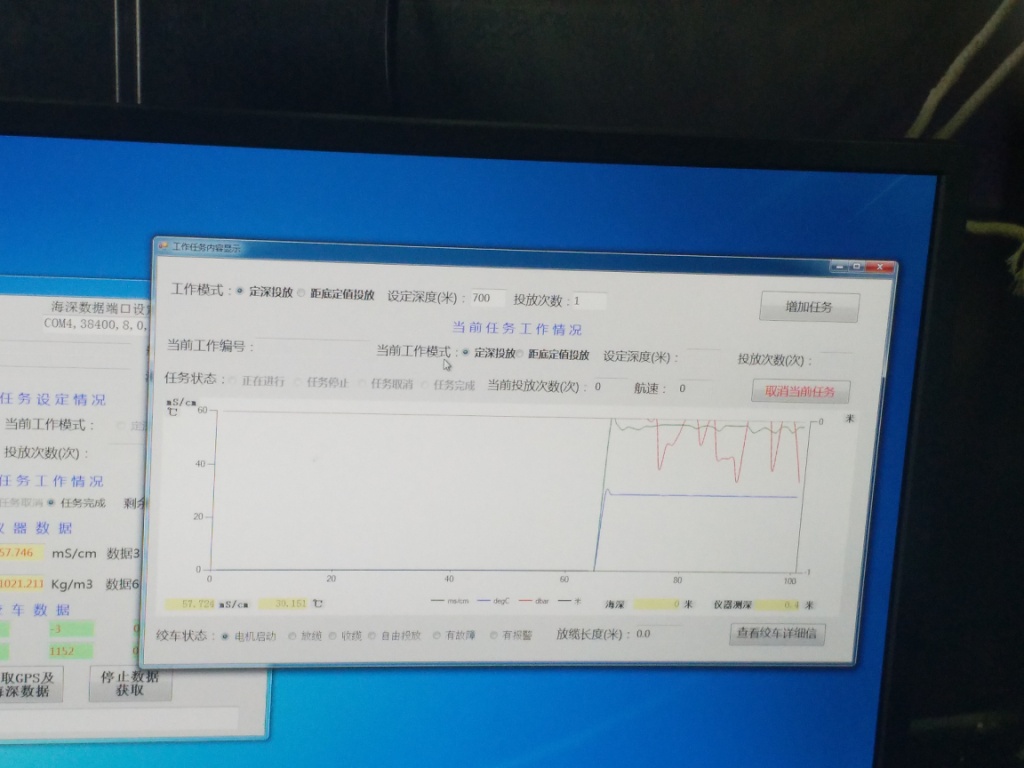
那么,如果想放1000m深度,那么,还是8.5节速度,缆长?,有余缆保护,定深投放,观察1000m深度时,缆长是多少?
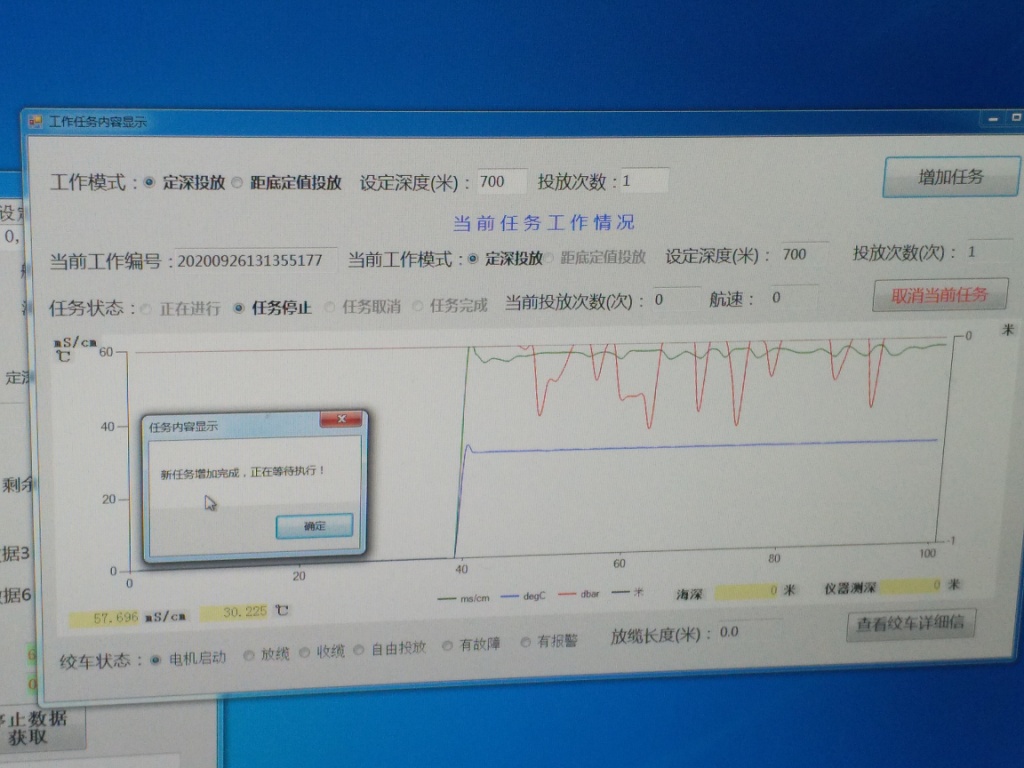
直接增加任务,不用取消当前任务
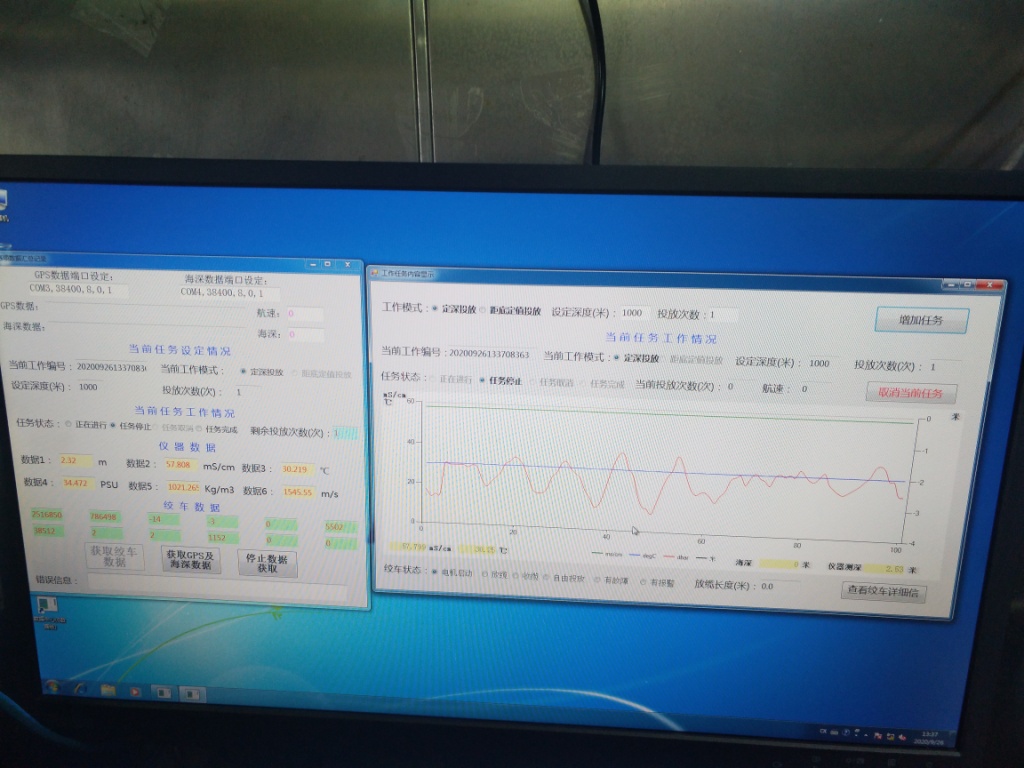
收回,有冲顶报警,3,3,
计数复位,缆车信息,
2,2,表示可以发送指令,如果弹出对话框要外场操作,可以外场操作,也可增加新任务
在回收时,遇到绞车突然刹车,不回收,后来与设备商沟通,同时打开护盖,发现行程开关已经锈掉坏了。
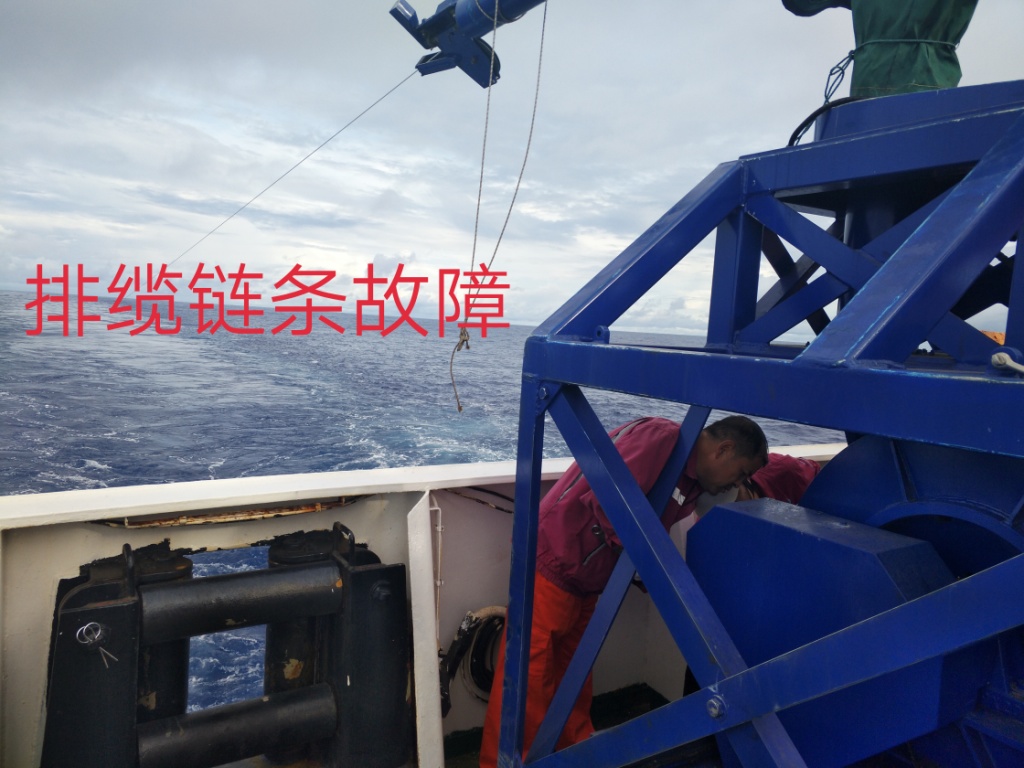

由于没有找到合适的行程开关,就直接短接,不经过行程开关,用手动控制收揽,所幸,收揽速度快,二十分钟就收完了。