研制的无人船预期的目标:
以上内容转载自:xiaok海洋测绘网
1. 智能导航:高精度GNSS(GPS、Galileo、GLONASS、BeiDou);高精度陀螺仪;
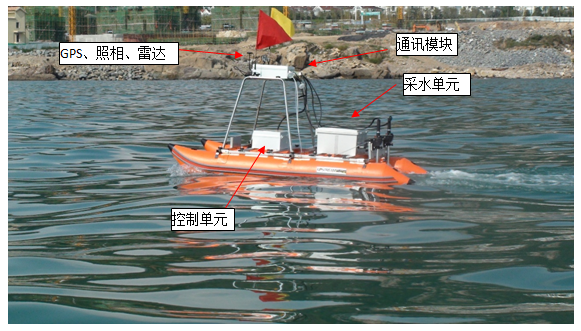
2. 可折叠式船体设计:无人船采用采用充气式双体结构,浮体为进口1.2mm厚高分子PVC夹网材料,便于无人船的携带和组装;平台支架为316高强度不锈钢材料,采取可拆卸方式,便于无人船的组装和维护;
3. 无人操控:无人船可通过遥控器远程操控,也可按指定的gps路径自动巡航;通过无线电、GPRS/3G等多种操作模式进行遥控;
4. 自主决策:自动探测障碍物选择最优路线航行;
5. 低碳环保:无人船动力为电动推进器,采用高容量锂离子聚合物电池续航40公里,续航速度4-5节,适用于3-4级海况。
6. 自动采样:实现海洋水 样的自动采集与灌装。
7. 水质数据实时采集与传输:传感器采集数据实时传输至无人船地面站或专有的数据中心;实现真正意义上近岸海域海洋环境实时监测。无人船一出海,监测数据即上传中心数据服务器,也即边航行边上传监测数据,减少海洋环境监测中心环节(采样,分析、数据处理、数据上传)等,极大提高监测数据时效性,
8. 与浮标结合实现海洋环境监测动静结合,点面互补,全面掌握近岸海洋环境现状及特点;
水质、地形监测船:

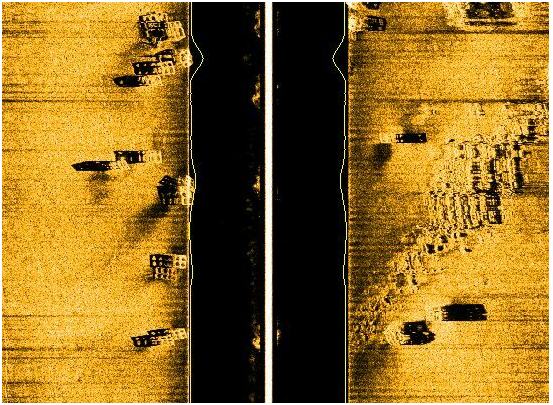
地貌监测船:


测试效果: