
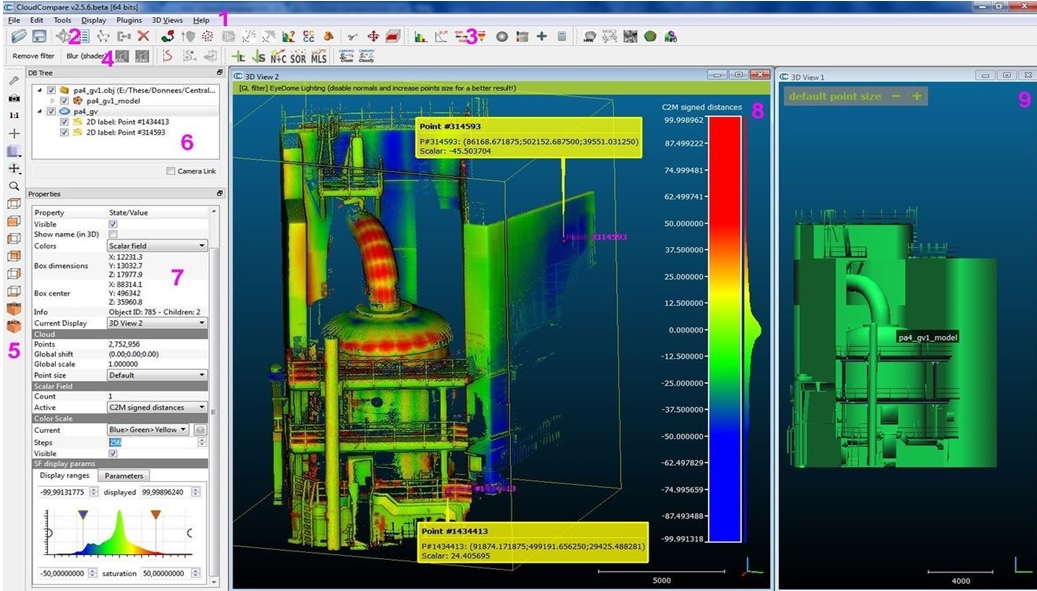
1、菜单
· 文件 (打开, 保存, 退出, 等.)
· 编辑 (编辑选择实体和它们的属性--颜色、法向量和标量场(scalar field)等.)
· 工具 (分割, 匹配, 投影, 等.)
· 显示(显示相关选项)
· 插件(加载插件)
· 3D视图(3D视图管理)
· 帮助(关于, 帮助, 等.)
2、实体:
(1)点云(point cloud)
(2)三角网(Mesh)
(3)子网集(sub-meshes)
(4)几何体(Primitives)
(5)多段线(Polyline)
3、点云相关的结构
(1) 八叉树(Octree)
八叉树(Octree)的定义是:若不为空树的话,树中任一节点的子节点恰好只会有八个,或零个,也就是子节点不会有0与8以外的数目。那么,这要用来做什么?想象一个立方体,我们最少可以切成多少个相同等分的小立方体?答案就是8个。再想象我们有一个房间,房间里某个角落藏着一枚金币,我们想很快的把金币找出来,聪明的你会怎么做?我们可以把房间当成一个立方体,先切成八个小立方体,然后排除掉没有放任何东西的小立方体,再把有可能藏金币的小立方体继续切八等份……如此下去,平均在Log8(房间内的所有物品数)的时间内就可找到金币。因此,八叉树就是用在3D空间中的场景管理,可以很快地知道物体在3D场景中的位置,或侦测与其它物体是否有碰撞以及是否在可视范围内。
(2) 显示感应器
① 地基激光感应器(Ground Based Laser Sensor)
② 投影照相机感应器(Projective Camera Sensor)
(3) 标注(Label)
4、其他实体
(1) 组(Group)
(2) 图像(image)
(3) 校准图片(calibrated picture)
(4)视口(viewport)
(5)2D区域标签(2D area label)
5、数据树(DB tree)
(1) 拖放(Drag and drop)
(2) 选择(Selection)
(3) 右键菜单(Context menu)
6、实体属性
(1) 实体显示属性(显隐,显示属性(颜色、法向量)等)
(2) 其他参数(点画(wireframe)、几何体参数))
(3) 诸如实体范围和中心,点数和三角面数等
7、标量场显示参数编辑器
8、支持文件格式
BIN,ASCII,LAS,E57,PTX,FARO,DP,PCD,PLY,OBJ,VTK,STL,OFF,FBX,DXF,SHP
PDMS,RASTER,OUT(Bundler),,2D images,PV,PN,SOI,ICM,Geo-Mascaret,
Sinusx,CSV matrix
9、显示模式
(1) 正视图(orthographic view)
(2) 透视图(perspective)(对象中心,观察者中心)
(3) 气泡视图(Bubble-view)(极坐标)
10、全局平移和缩放(Global Shift and Scale)