过去12周;Reach机器人;实习生Cameron;陈丹尼尔;江;和Nelson;Reynolds Walsh公司;已经;开发原型;人机界面(HMI);要配对的控制器;蓝图;实验室;操纵器 ;在他们实习的最后阶段;他们展示了他们的设计——主臂三角洲 ;该演示完善了他们的;夏季;实习;在Blueprint;实验室 ;
该项目的目的是开发;a;6、;自由度(6DOF);控制器;能够;模仿;速度;(°/s);和笛卡尔;(x,y,z,滚转,俯仰,偏航);运动;用户的 ;这是作为;替代 蓝图;实验室;主臂 ;
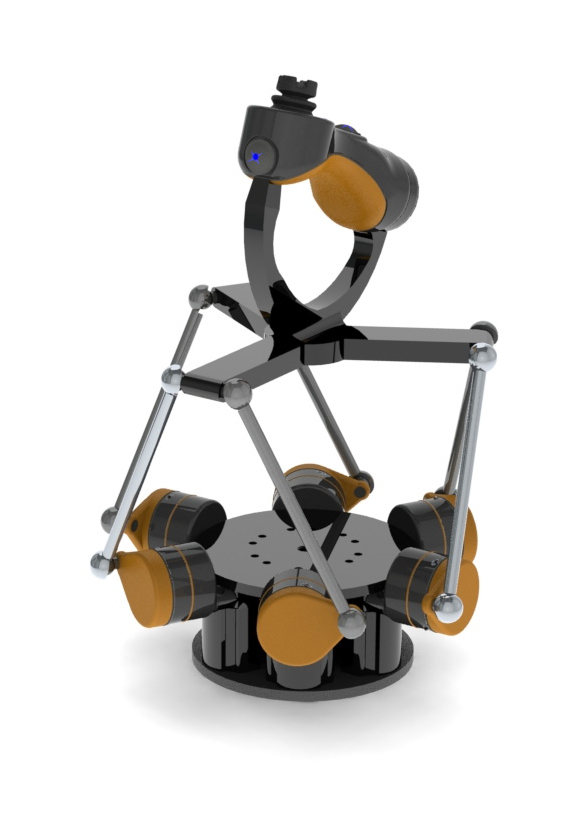
主臂增量为;基于;a斯图尔特;带有电机底座环的平台,电机底座环与 机械手 新技术简化了用户体验,其中运营商专注于单一目标;末端执行器位置,而所有其他关节机构都是自动化的以满足末端执行器的要求;s规范。这使得能够以更高的效率和精度进行控制,因为手动对准和调整单个操纵器关节所花费的时间更少;运动、位置和旋转。 ;
Nelson概述了亮点;他的夏天;实习 ;
“-有机会领导一个机械设计项目,从最初的设计构思到生产末端执行器控制器的功能原型(所有这些都得到了Reach Robotics研发团队的支持和资源);
– 具有外包精密加工、公司工程数据管理系统和其他高水平工程实践的经验 ;
– ;具有行业标准工程实践经验,如指导精密加工零件和接触机械设计产品数据管理(PDM)系统 ;
– ;;有机会贡献机械设计解决方案,以帮助公司的持续改进;s生产线及其效率 ;
– ;在专业环境中应用先进的理论概念,如正向运动学控制和有限元分析。” ;
经过评估,他们发现主臂三角洲达到了;大型;运动范围,更高的控制分辨率;有效;力反馈;一个;人体工程学设计,以及;已使用;现有的;Reach机器人;组件 ;领域;未来;改进包括;;占地面积大;以及;;错综复杂的;设计 ;
Reach Robotics的所有团队都很高兴接待您;Nelson、Cameron和Daniel;你把一个想法迅速变成现实的方式给我们留下了深刻的印象 ;我们希望;你们所有人;看起来非常棒的;有前途的职业 ;