
水下机器人,也可以称为无人水下潜航器(Unmanned Underwater Vehicle,UUV),是在水下的极限环境中运行并能潜入水面替代人进行某种动作的可控机器结构。水下无人潜航器通常可分为三类:遥控水下机器人(ROV,Remotely Operated Vehicle)、载人水下航行器(HOV,Human-occupied Vehicle)和智能水下机器人(AUV,Autonomous Underwater Vehicles),其优缺点见下表
ROV主要要应用于海洋石油开采业务。1975至1985年,由于海洋油气业的迅速发展,水下机器人飞速发展进入一个全新的发展时期。到1981年,无人遥控水下机器人市场保有量400余艘,其中90%以上用来直接或间接为海洋石油开采业服务。海洋石油和天然气开发的需要,推动了水下机器人理论和应用的研究,水下机器人的数量和种类显著增长。
ROV数量众多,设计各不相同,功能及复杂度千差万别,英国Douglas Westwood根据业界实践,将ROV分为7种类型,分别为微型ROV(Miniature ROVs, MROVs)、可视型ROV(Eyeball ROVs, EROVs)、观察型ROV(Inspection ROVs, IROVs)、拖拽型ROV(Remotely Operated Towed Vehicles, ROTVs)、作业型ROV(Work-Class ROVs, WROVs)、履带型ROV(Tracked ROVs, TROVs)、挖掘型ROV(Ploughs)。

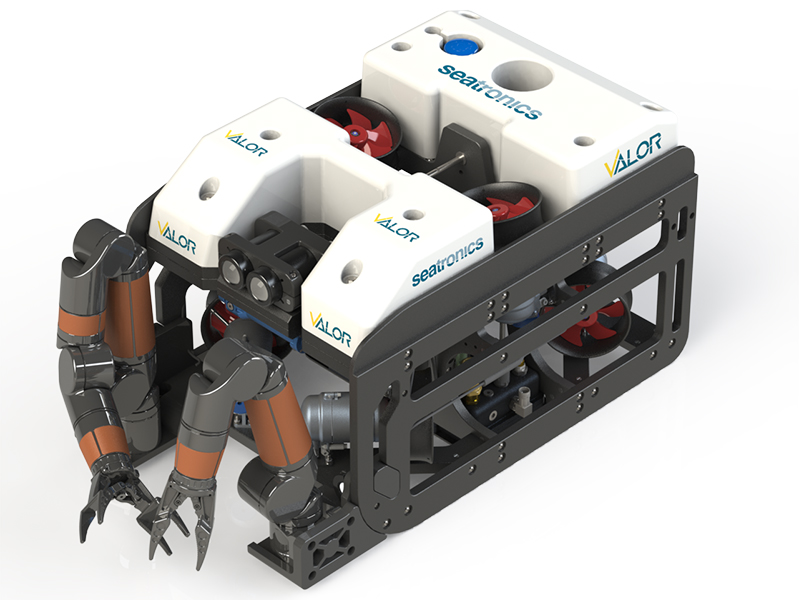
我们单位前两年购买了一台轻量的观察级ROV,型号是Valor,见下图,制造商是Seatronics。可惜,我们一直没有机会使用。前段时间我们测试了一下,使用起来特别复杂,代理商技术员张工调试了好几天。ROV只是一个水下平台,需要根据自己的业务选配传感器,我们选配了摄像头和三维激光扫描仪。
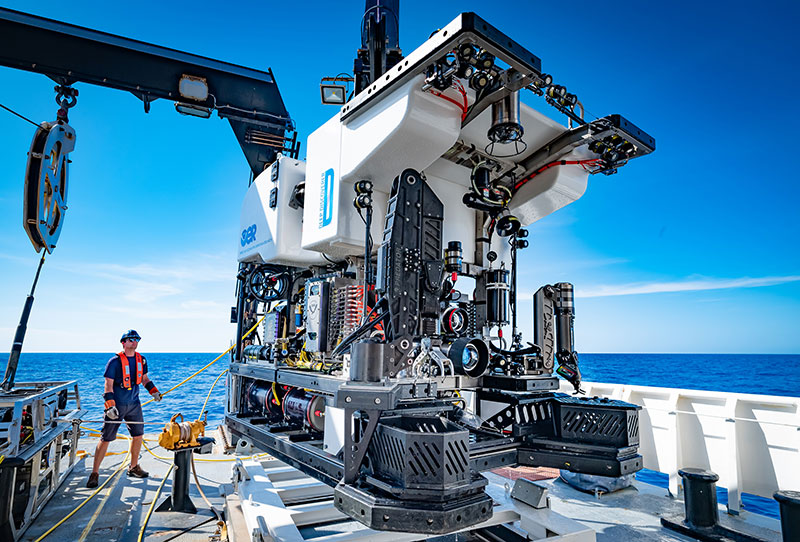
大型ROV能加载更多的传感器,下图是海洋探索公司(Ocean Exploration)的ROV,名字叫深海发现者(Deep Discoverer) ,其身体分布着密密麻麻的传感器,与它旁边的人对比,显得非常庞大。
由于 20 世纪 80 年代以来人工智能技术、微电子技术和控制技术的迅速进步,国外智能水下机器人科技也取得了蓬勃发展,特别是在许多中国沿海国家的水下机器人技术发展得很快,已经形成了许多世界著名的水下机器人研究机构,如美国伍兹霍尔海洋研究所、加拿大海洋科技中心、日本东京大学水下机器人研究研究室等。同时,为了更好地引导世界的水下机器人研究,一些国际协会也做出了很大的贡献,如 IEEE 海洋工程协会、海事技术协会等。
先进 AUV 技术在当代海洋作业中发挥了重要的作用。其中,主要 AUV 包括美国霍尔物资研究所研制的 REMUS6000 和Seabed、日本东京大学生产技术研究所开发的 Tam-Egg、Twin-Burger 系列自主式 AUV 等。
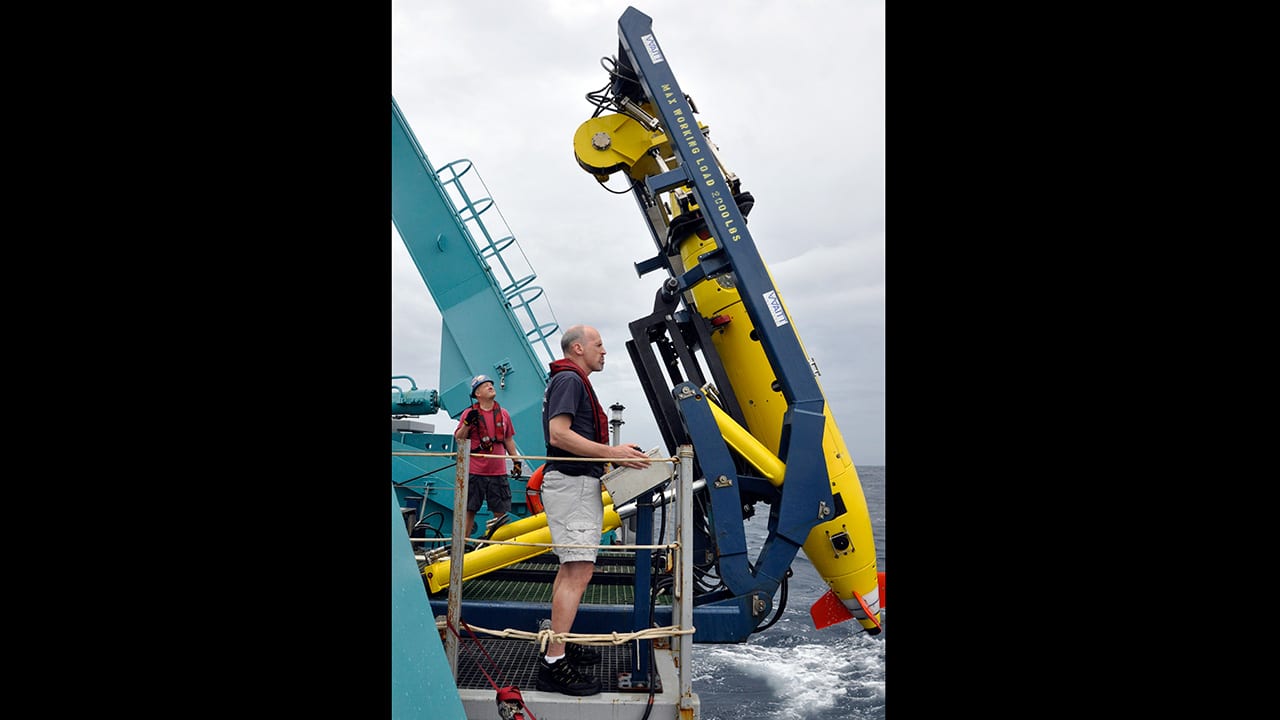
下图是REMUS6000,根据官网介绍,在2011的航次中,它在大西洋3900m深处发现了法航447的残骸。
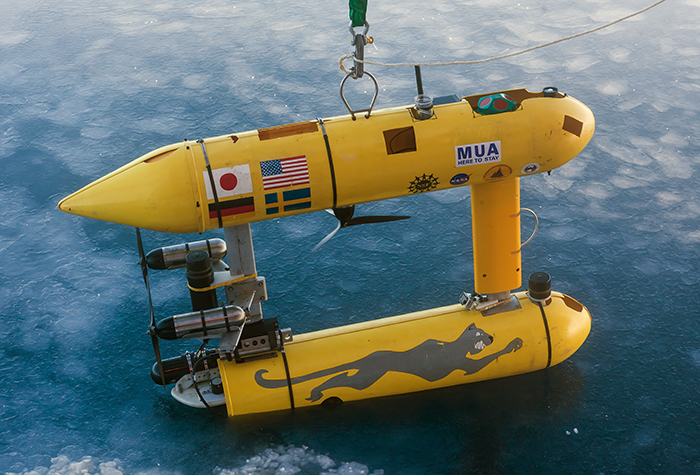
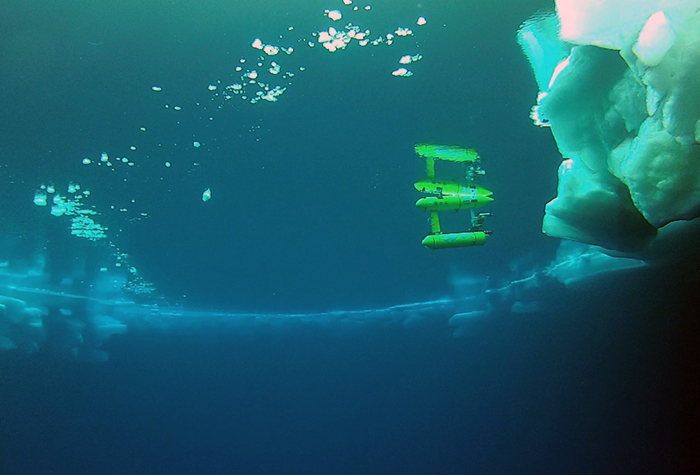
下图是Seabed级AUV,第二张似乎是冰区探测的照片。
1. 向远程发展
限制水下机器人向远程快速发展的主要技术阻碍有三种,即燃油、远程航行以及实时通讯。而目前正在研发的所有可以使用的燃油系统,包含一次性燃油动力电池、二次电池、燃油动力电池、热机和核能量。利用太阳光的自主水下机器人也是令人瞩目的新进展,因为太阳光自主水下机器人必须漂浮在水中并为机载能量系统再充电,但同时这种可使用的能量系统也是无限的。
2. 向深海发展
6000 米以上水深的海域面积约占世界海洋总面积的 97%,所以很多国家都将发展 6000 米水深技术当成一项目标。美国、日本等先进国家也都相继研究了 6000 米级的 UUV。美国伍兹霍尔海洋研究所就研制了一款深海探测潜器“ABE”,可在水深 6000 米的海底逗留一年。日本于 1993 年研发成工作水深为11000 米的深海无人潜器“海沟号”。
3. 向智能型发展
提高人类水底机器人行为的智慧水平,一向是全世界科研人员的共同奋斗目标。不过,由于目前的人工智慧科技已经无法适应人类水底机器人智能水平快速发展的需求,所以就必须把人的智慧融入水底人工智能机器人当中,这也便是未来发展监控型水底人工智能机器人的基本思路。不完全依赖于机械的智慧,而更多地依靠于感应器和人的智慧,是今后的一种主要发展趋势,因此我们可以将这些人工智能机器人称之为依靠感应器的现代化水下机器人。未来发展多人工智能机器人协作控制,也是提高人类自主水下机器人智能水平的关键方面。
纵览水下机器人公司的发展情况,除外水下机器人仅作为公司部分业务的新三板上市公司臻迪科技,纯粹的水下机器人公司头部玩家为深之蓝、博雅工道,分别于2018年7月和2019年5月完成了B轮融资,其余玩家大多处在Pre-A轮次。相比竞争激烈的航拍无人机市场,消费级水下无人机市场还处于早期阶段。
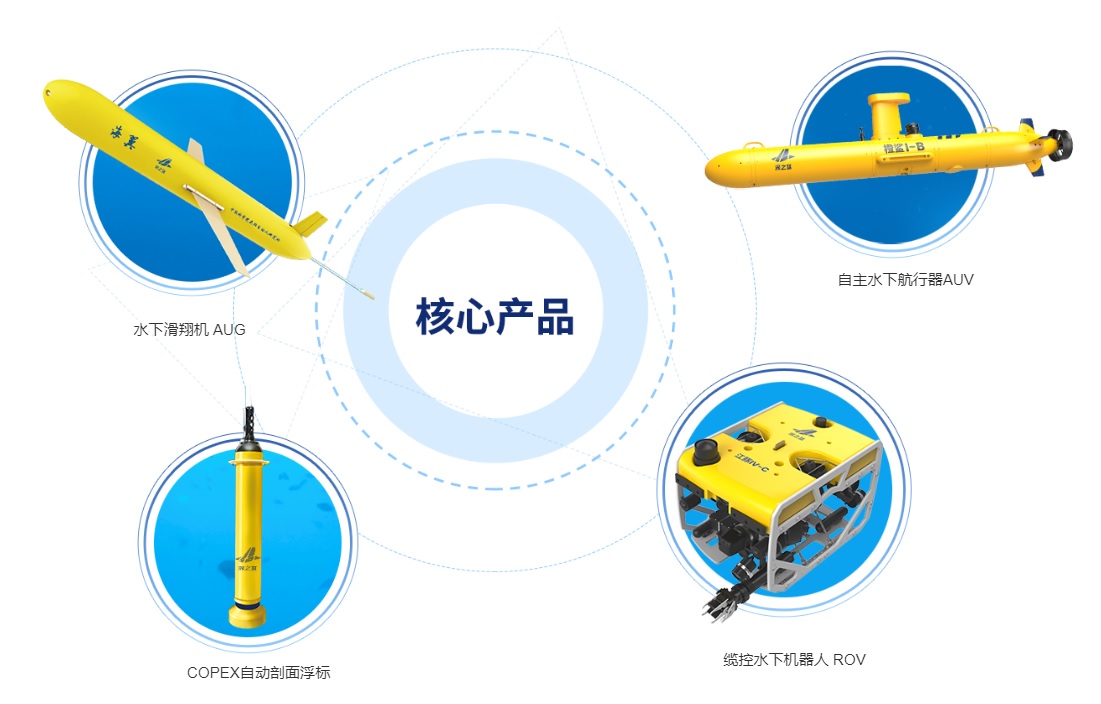
下图是深之蓝的核心产品图。
下图是博雅工道消费级和企业级产品截图。


参考文献
水下机器人研究现状及趋势分析_肖晴晗
https://new.qq.com/omn/20190911/20190911A0J62500.html
https://seatronics-group.com/
https://www.whoi.edu/oceanrobots/robots/seabed-phone.html
https://www.deepinfar.com/
http://www.robosea.org/cn/qiyejichanpin.html