
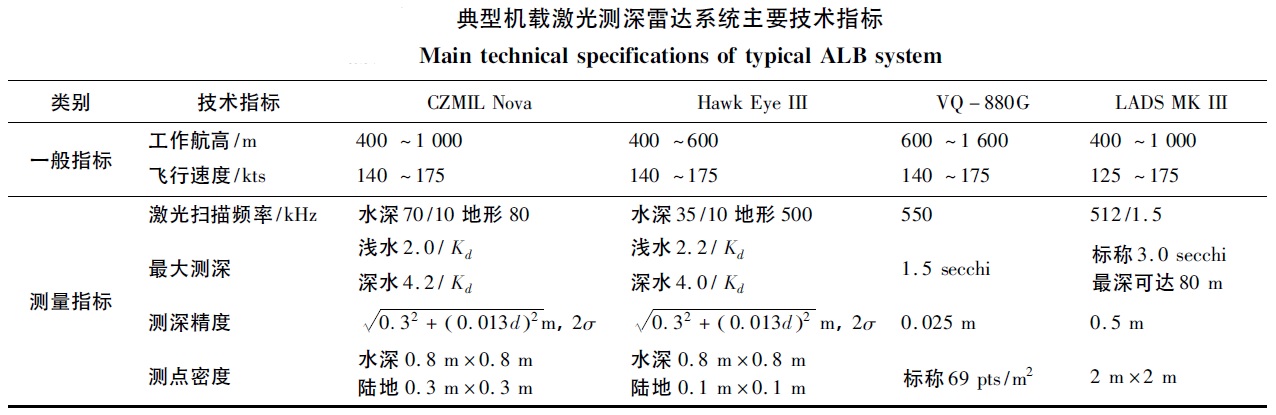
机载激光雷达测深测量是集激光测距、GNSS定位/姿态测量、航空摄影等多种技术于一体的新型主动机载激光测绘,可应用于海滩和海岸线、浅海编图、海岛、岛礁、水下障碍物的调查,是高效获取高精度近岸海底地形的重要技术,尤其对“人下不去、船上不来”海岸带的海陆一体化测量更具优势。机载激光雷达测深设备代表性的有TeledyneOptech 公司的CZMIL 系列、Leica 公司的HawkEye 系列、RIEGL 公司的VQ 系列和Fugro 公司的LADS 系列,见下表。表中,Kd为机载激光雷达水深测量系统测深工作波长处的漫衰减系数; d 为测量深度( 单位: m) ; 2σ 表示2 倍中误差。
1、CZMIL 机载激光雷达测深原理
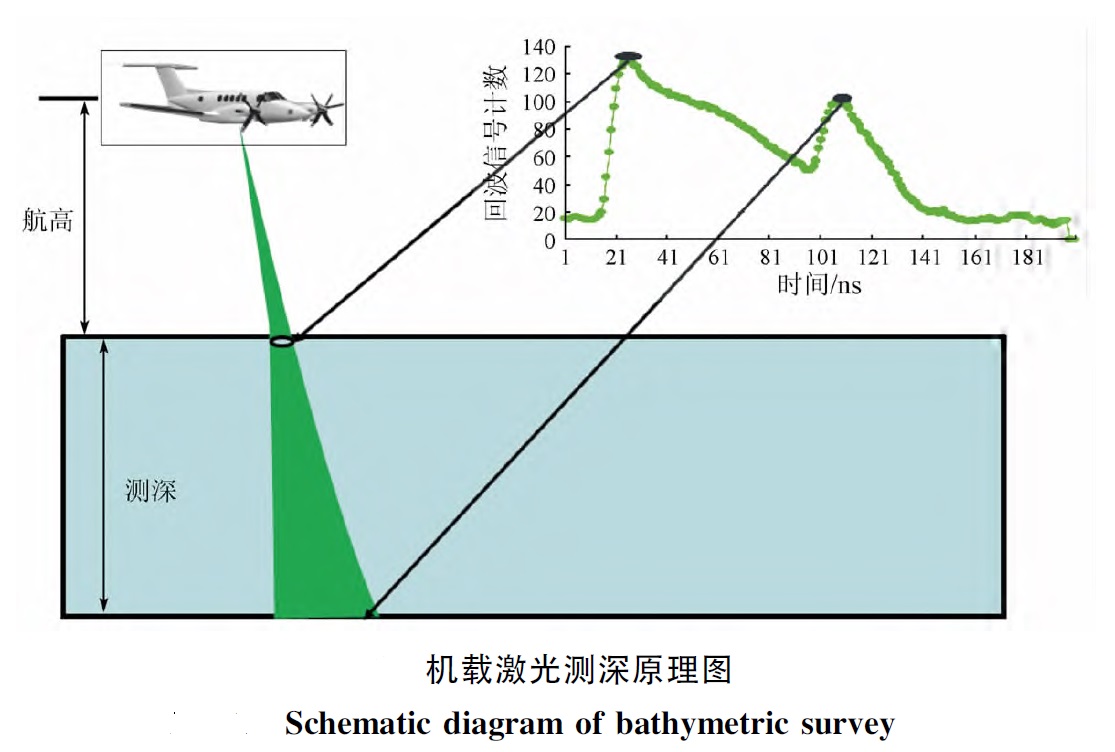
CZMIL Nova 系统的测深激光雷达在进行测量作业时同时发射1064nm( 近红外波段) 和532nm( 绿波段) 的大能量、窄脉冲、高保真度的激光。其中红外波段不易穿透海水从而探测到水面后就进行回波; 而波长处于0.47~0.58 μm 之间的绿光穿透海水时的衰减最小,穿透性强且方向性好,可探测到海底,并被海底反射最终被传感器接收。通过测量激光在海面和海底的往返时间差,即可利用水中光速计算出海面至海底的瞬时水深值; 通过系统获取的定姿定位参数计算激光在陆地和海底的三维坐标,即可得到海陆一体地形数据,机载激光测深原理示意见下图。图中波形图中第1个波峰代表水面回波信号; 第2个波峰代表水底回波信号,2个波峰之间的时间差即为激光在海面和海底的往返时间差。
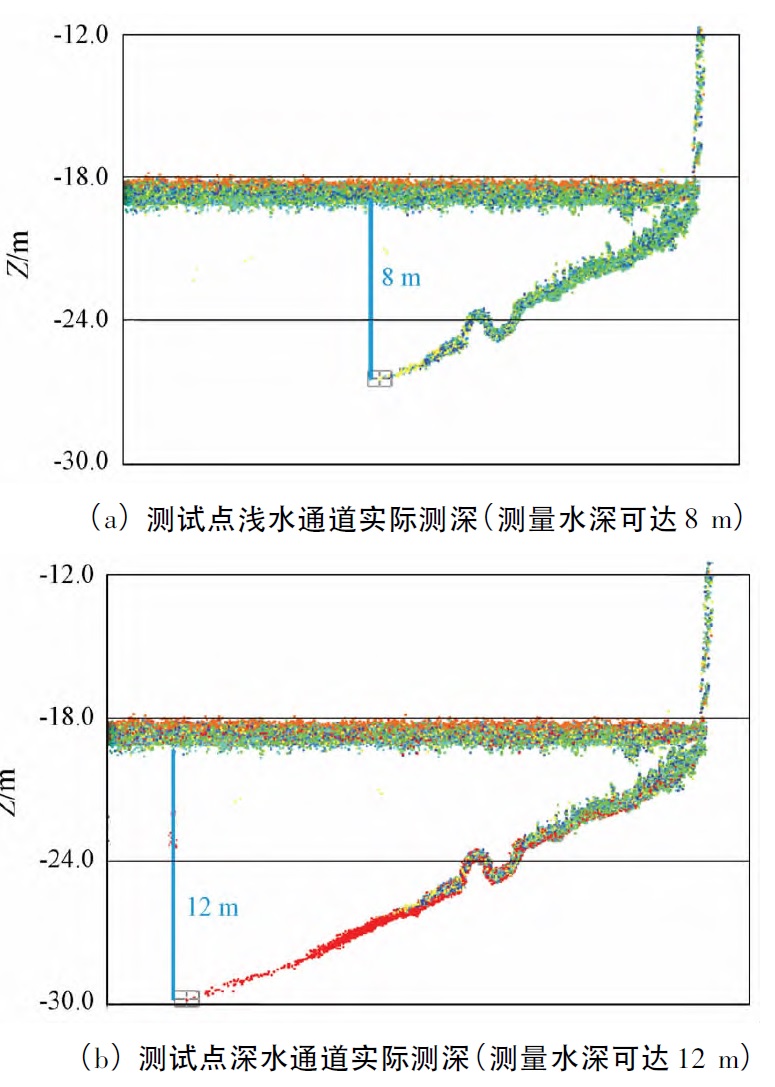
CZMIL Nova 系统采用特殊的多通道接收器架构,共有3 个接收器。1 个红外通道实现陆地和水面回波探测; 1 个深水通道用于深水回波探测; 7 个浅水通道用于浅水和陆地回波探测。下图是浅水和深水通道的对比图。
2、CZMIL 机载激光雷达测深系统产品
CZMIL Nova 系统集成了3 种传感器(测深激光雷达、CASI-1500h 高光谱成像仪、Phase One iXU-RS1000 数字相机等),在海岸带及岛礁调查中能够通过一次飞行同时获取多种数据。根据处理的程度该系统产品可以分为4 级,其中有些产品的制作需要结合其他专业应用软件和另行开发算法实现。
1) L0,原始级。主要包括激光( light detectionand ranging,LiDAR) 原始数据、高光谱原始数据、数字相机原始影像,此外还包括机载定位定向系统( position orientation system,POS) 数据、地面GPS 基站数据等辅助数据,由外业飞行直接获取。
2) L1,基础级。主要包括LiDAR 三维点云、高光谱正射影像、数字相机正射影像等,是系统机载测深测量最主要和最基本的产品。
3) L2,成果级。在基础级产品的基础上,经过大量人工操作而处理生成的产品。基于LiDAR 三维点云,可生成LiDAR 高程影像图( 即海陆一体地形) 、LiDAR 裸露地表数字高程模型、水陆分类图、LiDAR 底部反射图、等深线图及实时水深图等,需要结合其他专业软件完成。基于高光谱正射影像,开展水色遥感研究,可生成相关参数图件。
4) L3,应用级。在基础级产品和成果级产品的基础上,针对具体的应用,经过多传感器融合处理或经过遥感解译而生成的产品。
3、岛屿海陆一体地形测量应用实例
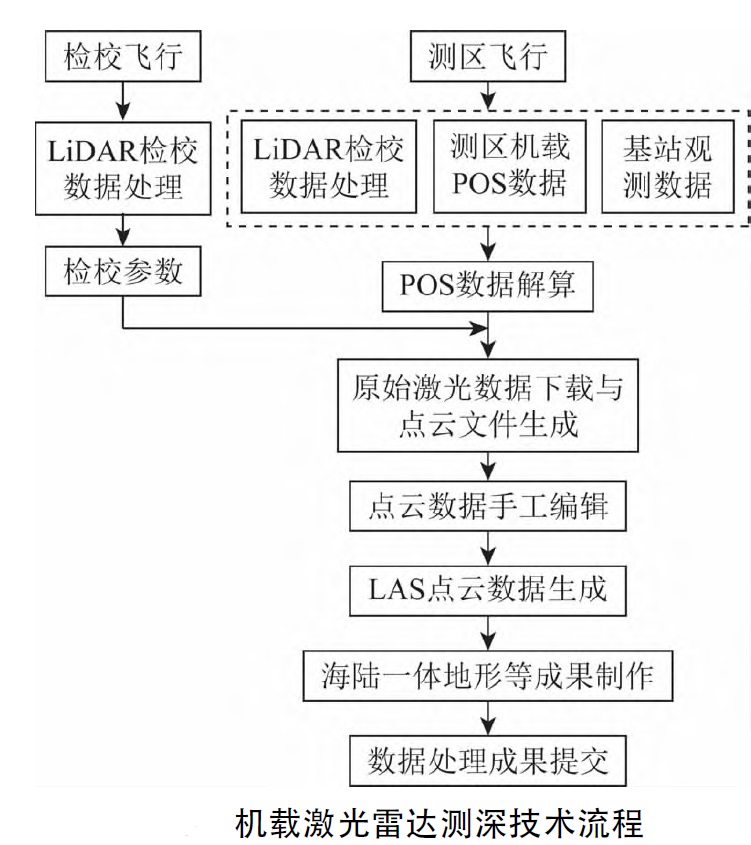
实例工作区位于北部湾某海岛。由于是改海岛是离岛,在地面上架设同步GNSS观测站是必需的,用来提供定位精度。机载激光雷达测深技术的流程如下图。
与多波束+激光扫描仪进行水上水下一体化测量一样,机载激光雷达测深技术核心就是检校。
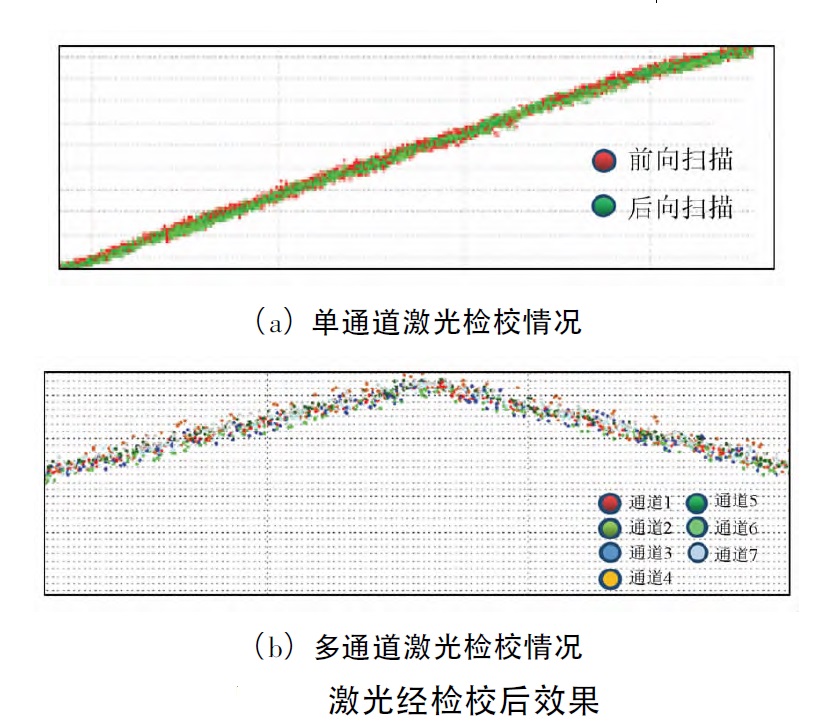
系统在飞机上安装之后进行激光检校,需解算出激光9 个接收通道在陆域与海域的扫描角偏移、俯仰和翻滚角偏移、距离偏移以及测深偏离等参数,用于对设备进行标校处理,保证各通道接收激光无偏差,且激光数据与测量控制数据无偏差。在陆地和水域分别布设检校场,陆地检校场用于校正陆地通道,以及其和浅水通道的偏差; 水域检校场用于校正激光测深偏差,以及浅水通道和深水通道的偏差。需要说明的是,系统在交付使用前,Optech 公司利用美国的检校场对设备开展了出厂检校,利用提供的检校文件作为初始值,微小调动个别参数后,通过选取同一地物激光剖面发现单通道各扫描方式之间激光数据吻合较好,浅水各通道激光数据已无偏差(见下图)。即可利用此检校文件开展后续处理工作。
数据处理步骤如下:
1) 原始数据下载和同步。利用机载POS 解算结果、飞行设计文件、系统参数等文件,完成原始激光雷达数据下载,及其与机载POS 数据的融合处理。
2) 激光点云生成。利用下载的激光雷达数据,探测每个雷达波形中的陆地、水面和水底位置,利用飞机的定位定姿数据和激光的指向信息,计算陆地、水面和水底的激光三维椭球坐标,生成WGS-84 椭球坐标系下标准格式的LAS 点云数据。
3) 激光点云人工编辑。对每条航带的三维激光点云数据进行模型建立,也可按区域范围( block)生成点云模型,导入到HydroFusion 软件的CME( CZMIL Manual Editor) 模块中进行噪声点人工去除,生成只包括陆地、海底地形的LAS 点云数据。
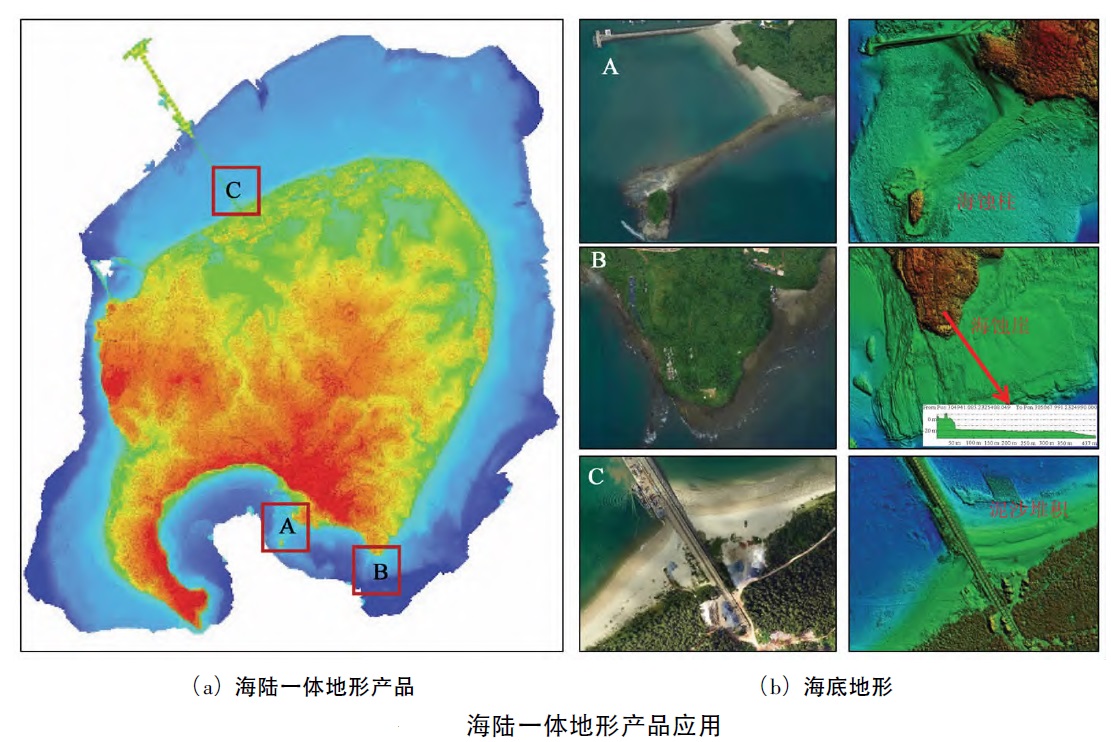
4) 海陆一体高程渲染图生成。利用地理信息系统软件,对点云数据进行二次编辑,保留可成图数据,删除局部离散的散点; 对点云数据进行栅格化处理,生成规定采样间隔的海陆一体数字高程图,并按照高程值对其进行渲染处理,叠加山体阴影,生成具有立体、彩色效果的海陆一体高程渲染图,以供后续应用解译使用。本次制图对于陆域点云编辑较为粗略,高程图例最高值选取为统计陆域地表高程最大值。在沿岸选取3 处海陆区域,清晰可见海底地形细节,见下图。
参考文献:
CZMIL机载LiDAR测...黄海和东海作业能力初步分析_隆华平
基于CZMIL_Nova的...带机载激光雷达测深潜力分析_李奇
基于CZMIL测深技术的海陆一体地形测量初探_吴芳