Ø 发射/接收阵(Transducer Arrays)
Ø 收发单元(Transceiver Unit(s),TRU)
Ø 前置放大器(Preamplifier Unit,PRU)
Ø 发射阵联接盒(TX Junction Box(es),TJB)
Ø 计算机(Operator Station)
Ø 远程控制单元(Remote Control)
相关辅助设备有:
Ø 原始数据记录器(Raw Data Logger,RDL)
Ø SeaPath330+(SP330+)
Ø 网络交换机(Hub1)
Ø 表层声速仪(SVS)
Ø 不间断电源(UPS)
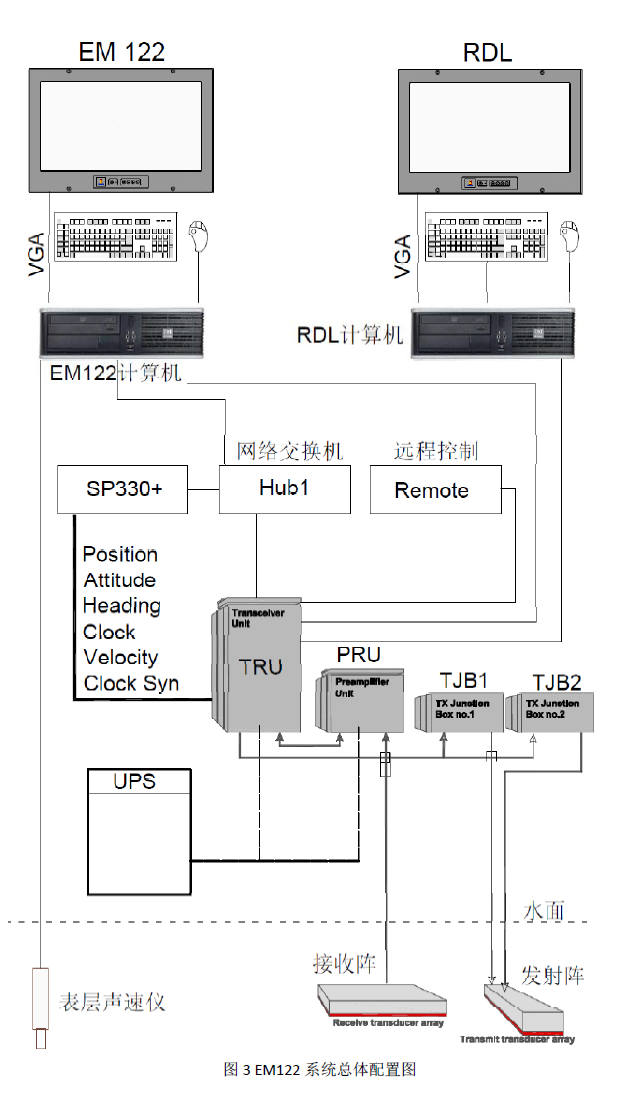
其中,发射/接收阵,表层声速仪侵泡在海水中,系统总体配置见图3所示。
发射阵有48个发射模块,接收阵有16个接收模块,它们以GONDOLA方式固定安装在船底,GONDOLA位于85-100肋位线,如图1所示,EM122的发射和接收换能器均内嵌于GONDOLA的安装槽内,如图2所示。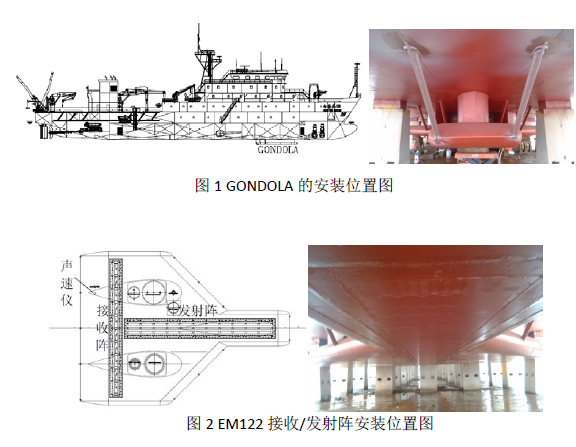
其中:
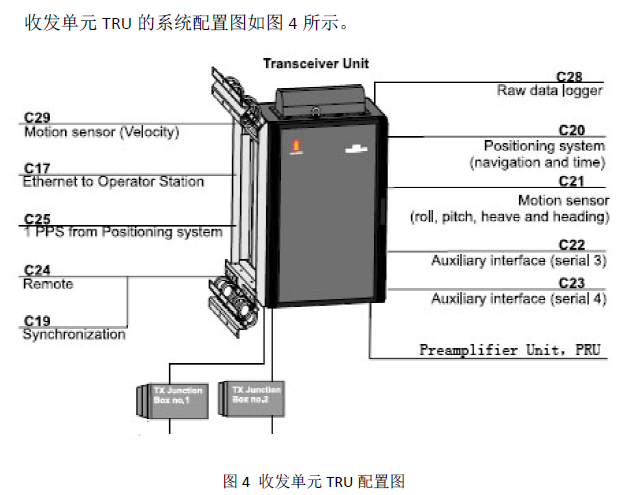
Ø C17,C28,(C19,C24)通过网线交叉直联,C17联接EM122计算机,C28联接原始数据记录器(RDL),(C19,C24)联接远程控制端
Ø C20,C21通过COM RS232联接SeaPath330+,C20联接SeaPath330+的COM10,C21联接SeaPath330+的COM11
Ø C25通过BNC线联接SeaPath330+的1PPS端口
Ø C29通过网线联接至网络交换机Hub1, SeaPath330+ 以(UDP,3001,BROADCAST)方式将Velocity在网络上进行广播,TRU以此端口接收。
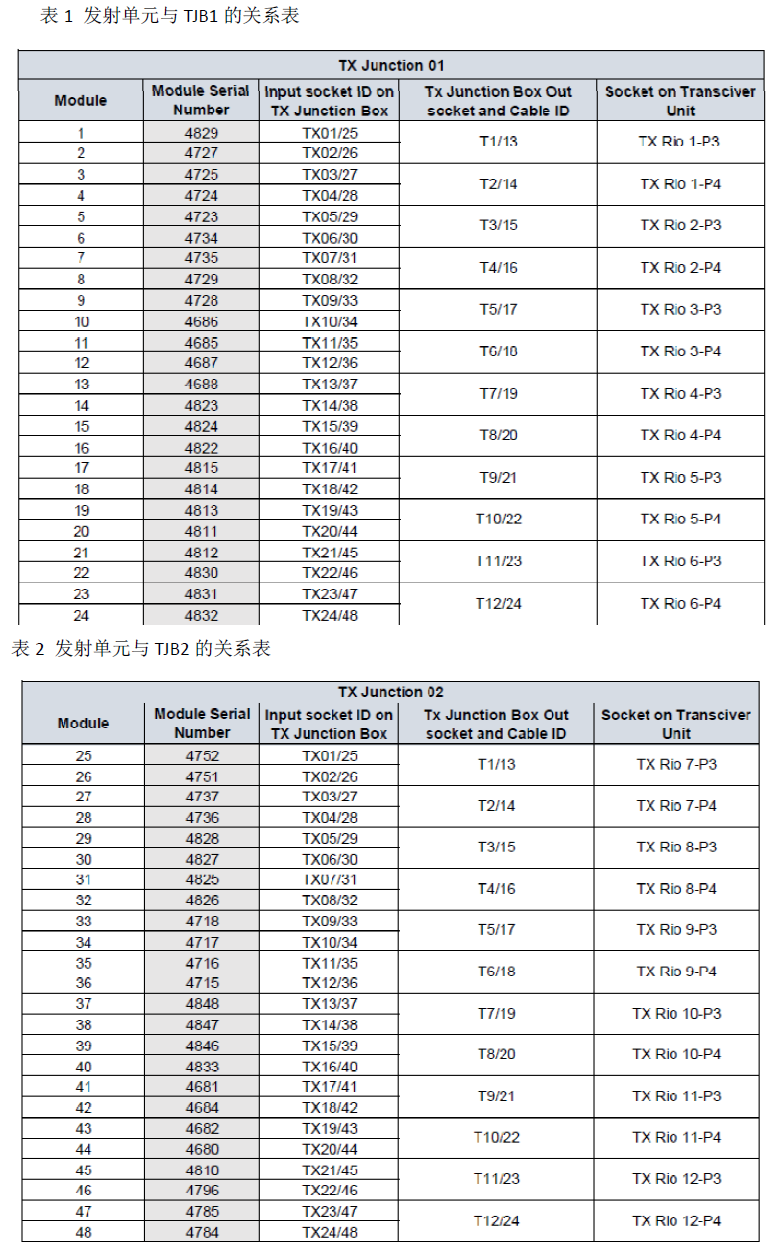
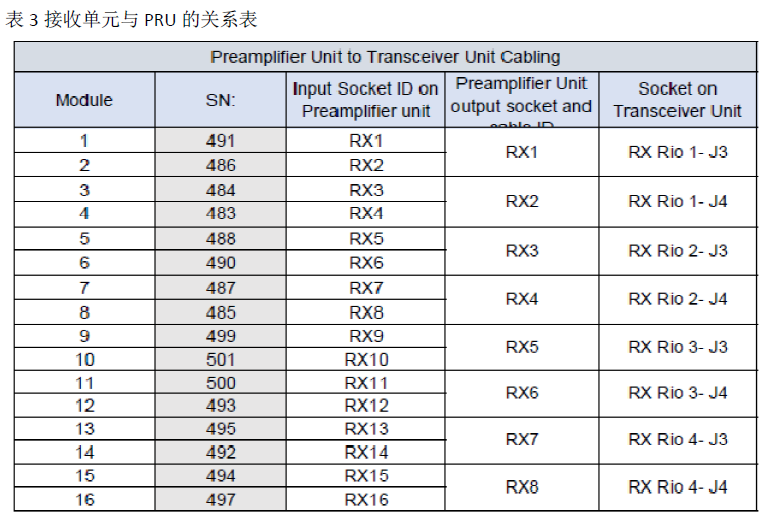
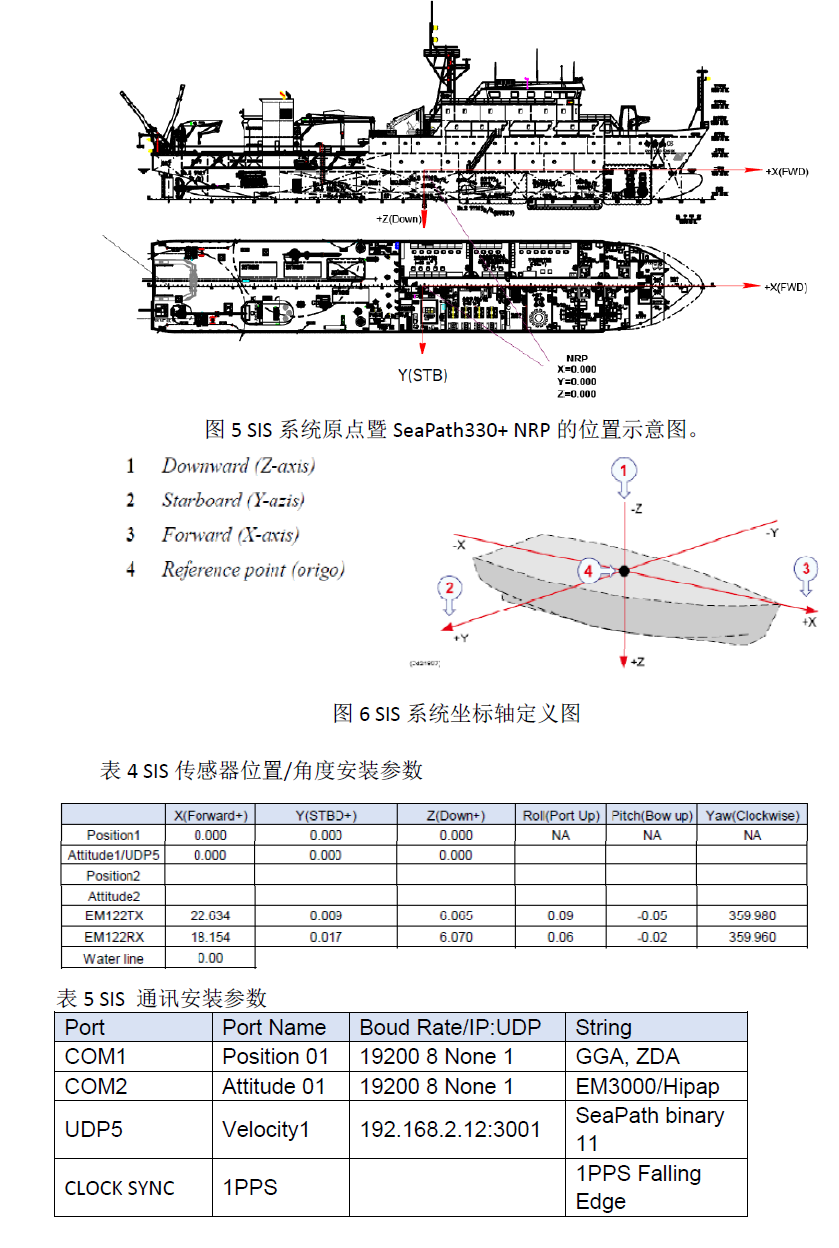
Ø TRU通过发射联接盒TJB1和TJB2与发射阵联接,通过前置放大器PRU与接收阵联接,TJB1联接24个发射单元,TJB2联接24个发射单元,PRU联接全部16个接收单元。
发射单元与TJB1和TJB2的关系见表1 和表2所示,1-48个发射单元在GONDOLA的排列顺序是从船头到船尾依次排列。前置放大器PRU与接收单元的关系见表3所示,1-16接收单元在GONDOLA的排列顺序是从船左舷到右舷依次排列。
EM122计算机的COM1口与表层声速仪相联,端口配置为(19200,N,8,1),表层声速仪的投放端位于通用干性实验室。
远程控制单元与TRU相联,有两个作用,一是控制收发单元TRU的On/Off,二是与同步器K-SYNC相联,控制收发单元的Trig In/Trig Out。
2)本次海试情况
系统的安装设置
硬件安装完成以后,进行EM122的采集软件SIS的配置。首先定义船舶坐标系统,以SeaPath330+的NRP为原点(SIS参考点),如图5、图6所示,以5m水线为船舶平面,X/Y轴位于船舶平面内,X轴为船舶中轴线,向前为正,Y轴垂直X轴,向右为正,Z轴垂直船舶平面,向下为正。
然后,根据各设备的测量结果配置SIS的安装参数,包括传感器的位置参数见表4所示,通讯参数见表5所示。
SIS配置好了以后,需要进行校正测量,确定表4中的Attidute1行中的RoLL,Pitch和Heading的参数。
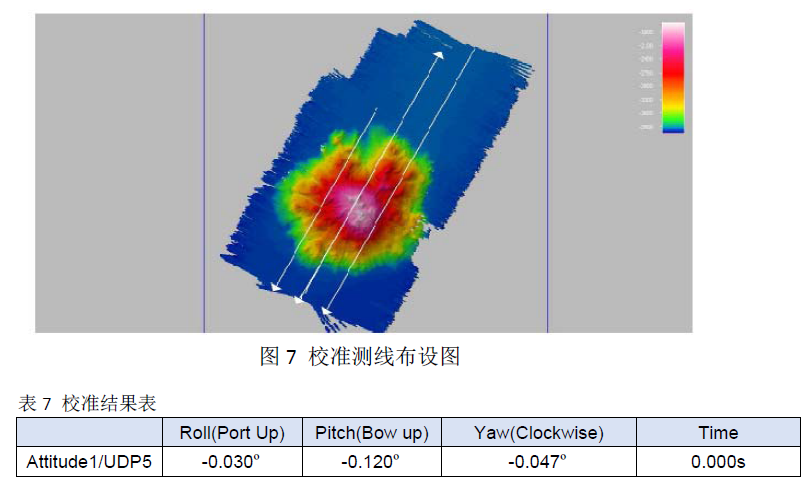
系统的校准测量
X月X日船舶抵达校准区,布设3条校准测线,中间测线进行往返测量,共记录4条测线文件,见表6和图7.校准计算后,得出校准结果,见表7,然后填入SIS的传感器角度安装参数的Attitude1行内。