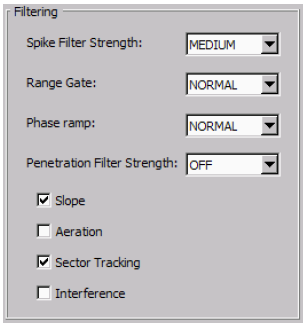
• Range gate: Normal
• Phase ramp: Normal
• Penetration Filter Strength: Off
• Slope: On
• Aeration: Off
• Sector Tracking: Off
• Interference: Off
每个ping都有两次海底检测,每次检测之后都要过滤(Filter)
• 第一次对所有波束的检测
• 第二次仅对缺乏有效检测的波束,但是,使用的是宽松标准在可视窗口内通过相邻波束派生
两次海底检测能减少错误测量,另外如果第一次检测波束是假的,被删除,第二次检测可能认为是有效的,会恢复。
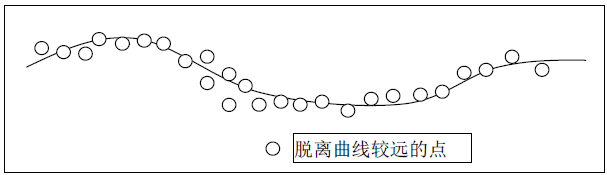
Spike Filter Strength(尖峰过滤强度):选项是:OFF,WEAK,MEDIUM和STRONG
定义海底平滑度,删除脱离平滑海底剖面较远的点,强度越强,脱离值越小
Range Gate(范围阀值):选项是:SMALL,NORMAL和LARGE
海底检测是在一个预定义的深度窗口内进行,深度限值基于前面的pings,Range Gate用来设定深度窗口的尺寸。
如果深度沿航迹变化显著,可以选择一个更大的Range Gate,但是这样会增加假的边缘波束以及干扰和噪声数据。
另外,选择更大的Range Gate可能会略微减少ping率
Phase ramp(相位斜坡):选项是:SHORT,NORMAL和LONG
用于设定相位检测之间重叠range(我认为是波束射线的长度)的程度(量)。
如果设置为SHORT,用作相位检测的采样数等于波束与相邻波束的range距离。结果就是波束之间的相位检测没有平均。(假设相位采样的最小数能做合理的相位检测)
如果设置为NORMAL,相位检测的采样数等于两倍波束与相邻波束的range距离,结果就是波束之间相位检测略微平均。
如果设置为LONG,相位曲线固定部分(± 40度)用作相位检测,结果就是波束之间相位检测平均随波束角增大而增加。
SHORT能获得更好的分辨率,但是副作用就是海底检测有更多的噪声,推荐使用NORMAL
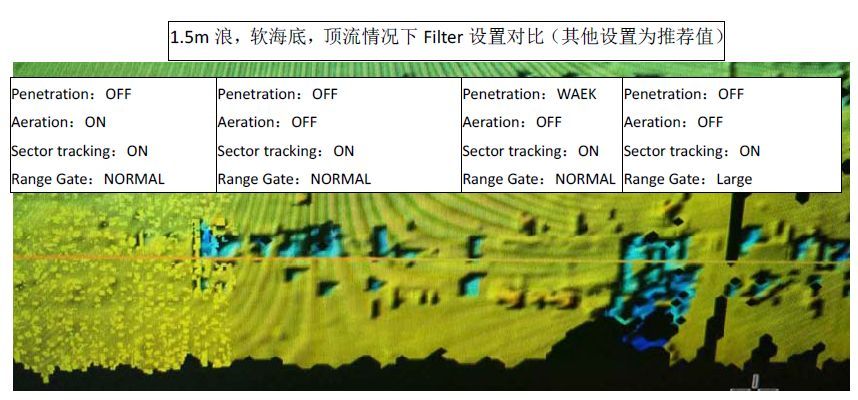
Penetration Filter(穿透过滤):选项是:OFF,WEAK,MEDIUM和STRONG
Penetraion Filter用于软的海底,这时,海底更趋于跟踪地层而不是真实海底,造成海底会出现凹陷和深沟。
如果设置为WEAK,海底跟踪优先是波束的第一个回声,即使强度低于随后的回声。
如果设置为MEDIUM和STRONG,海底跟踪能区分海底和地层,即使它们之前的间隔很小,这样会降低换能器的分辨率,除非遇到严重的穿透问题,才会使用这两个设置。
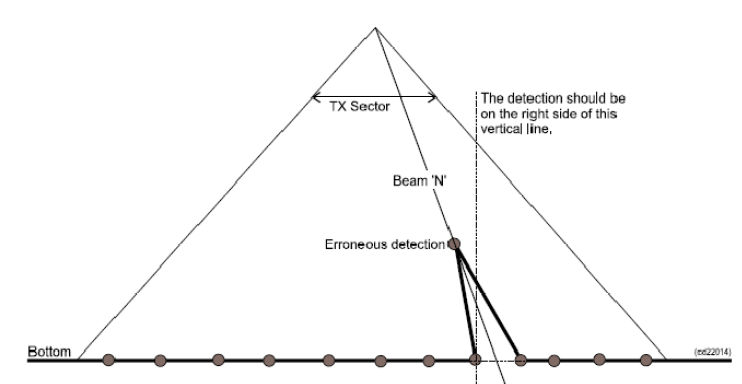
Slope(斜坡):用作检查内向倾斜的斜坡,这些朝向船的倾斜将被删除,因为离中央波束越远,波束横向距离越大,删除这些倾斜以后,在更远的range里搜索海底。
Aeration(曝气):如果换能器周围有气泡,海底跟踪会出现问题。使用这个Filter能强迫系统在较长时间内保持跟踪相同深度,如果在水深相对不变的区域,这个Filter能增加系统的性能,然后,海底水深变化显著的区域,这个Filter可能适得其反。
Sector tracking(分区跟踪):每个ping有几个Pulse,每个Pulse代表Swath不同的区块。这个设置能进行分区强度补偿,避免区块之间的强度偏移,一般情况下,这个设置是ON,只有进行侧扫声纳影像的强度校正时,才设置为OFF。
这个设置不影响深度测量,只影响背散射强度。
Interference(干扰):如果船舶还装有其他声学设备或者频率相近的声纳,它们会干扰多波束。最好的办法是安装声学同步器,如果没有,将这个Filter设置为ON,能减弱干扰的影响。
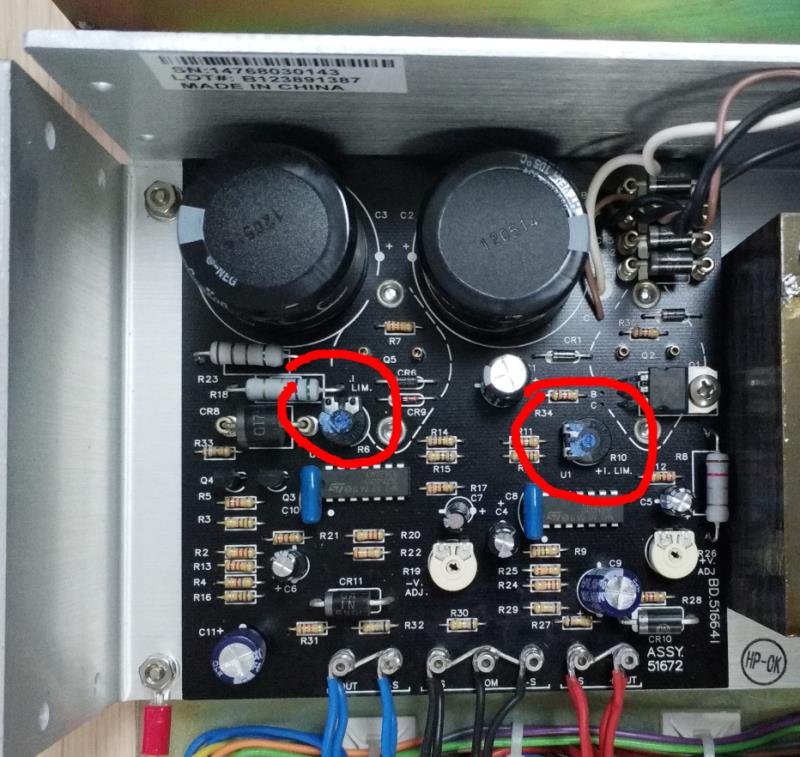
如果丢波严重或者是没有回波,需要考虑调整前置放大器电源板的电流(下图红色框内的蓝色电阻)或者电压(下图白色电阻)。