

(此乃航次获奖照片,形似佛光)
(1) 处理导航数据,使用辅助的导航处理功能处理,提取按天提取导航信息
(2) MGDP,列对齐
(3) 转换成儒略日
(4) 提取定位数据,重力预处理(同上导航数据处理步骤),提取重力数据
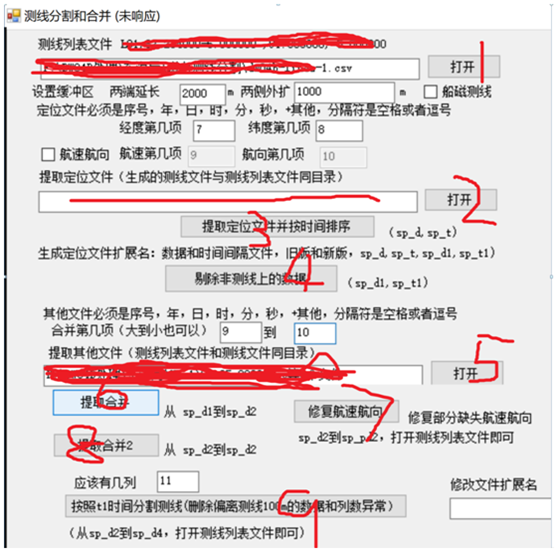
(5)利用辅助程序分割测线,添加导航文件的航速航向;添加水深
根据定位从水深DTM中提取重力仪位置的水深
(6)重力仪位置偏移
(7)在图形界面剔除位置、水深和重力异常点
(8)零漂改正
(9)厄特渥斯校正
(10)计算正常场
(11)计算空间异常
(12)布格异常
(13)测网平差
测网平差,即计算交点差