
Kongsberg多波束的输入COM中,以下内容摘自SIS参考手册:
Input port: This drop-down combo-box is used to select which of the PU (Processing
Unit) ports the dialogue box is applicable to. Choose between the serial ports COM1
to COM4 or the network ports UDP2, UDP5 or UDP6.
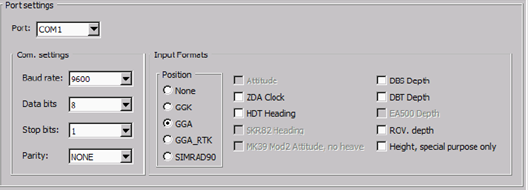
• COM1: Normally used for position, clock and depth input.
• COM2: Designated to input from a motion sensor.
• COM3: Optional (position, motion and heading input).
• COM4: Optional (position and heading input).
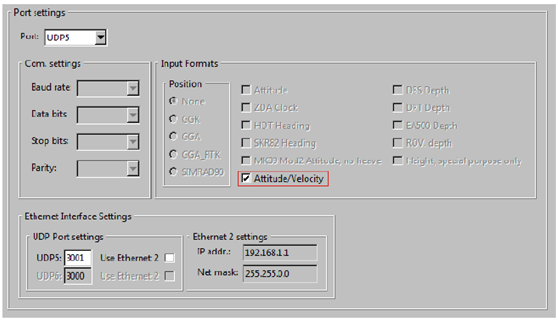
• UDP2: Attitude/Position and EA 500 depth input.
• UDP5: Attitude velocity input 1 (applies to EM 122, EM 302, EM 710, EM 2040
and EM 2040C)
• UDP6: Attitude velocity input 2 (applies to EM 122, EM 302, EM 710, EM 2040
and EM 2040C)
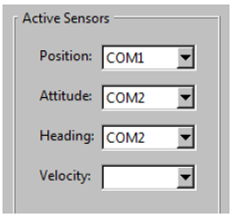
从上面的内容可知,EM2040D多波束可以有2套输入位置和姿态,可以1套备用,1套激活,一般COM1、COM2和UDP5为1套,分别输入位置、姿态和姿态加速度,COM3、COM4和UDP6为1套,分别输入姿态、位置和姿态加速度。安装参数的面板有这样的选项:
跟2040C的区别好像是2040C不需要姿态加速度即UDP5/UDP6输入的内容,姿态加速度通过网络UDP广播方式。
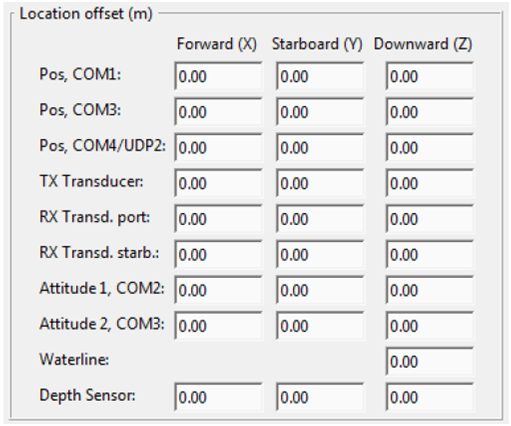
在SIS的安装参数的面板,也支持2套输入的偏移参数输入。
这几天为EM2040D加上了另一套IMU系统,就是现在主流的POSMV,因为HYDRINS很贵而且各种限制,而POSMV可以记录POSPAC数据进行后期处理,实现潮位反演和水深精细化处理。今年我们的目标就是通过POSMV和TerraPos软件利用PPP实现潮位反演,使得水深达到85面的统一。通过技术攻关,使得这个想法尽快落地。
记录POSPac窗口如下:
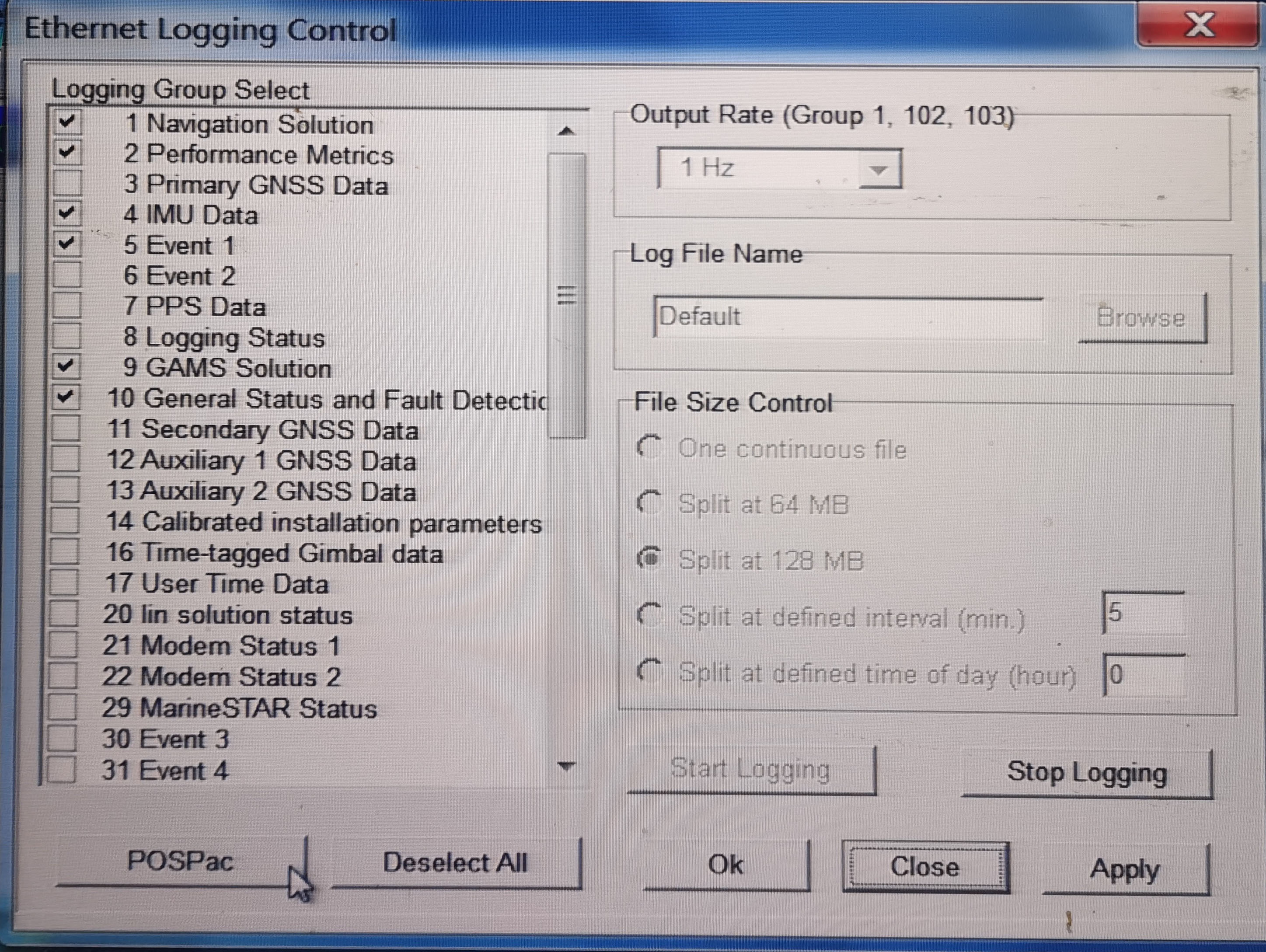
其中遇到各种问题:
1、船舶预留的GPS同轴缆不通,
推测肯定出在首尾端,通过万用表测量,是室外端的问题,将破损处剪断,仍然不通,后来仔细找,发现1处破损,先不敢剪断,因为再剪,线就不大够了,先测试了,发现只有这一处了,再剪断。

2、COM3和COM4网口转COM口的问题
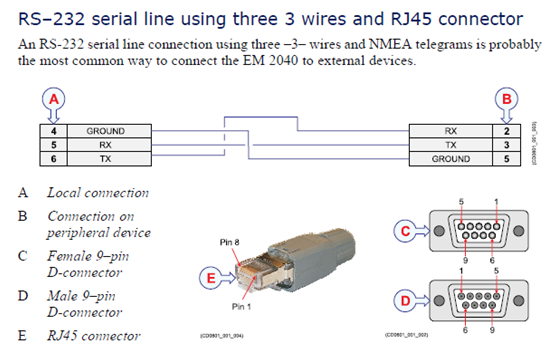
RJ45是A口,是接收RX,也就是接网线的pin4和pin5,COM口对应是2和5,因为从GPS出来的TX接的是转换线COM口的2。见下图。

3、POSMV与HYDRINS的子网掩码的问题
由于POSMV默认的是192.168.53.100,而HYDRINS是192.168.36.128,因此需要将2个设备的IP地址设置在一个网段,比如都是192.168.36。XXX,但是奇怪的是,即使它们在同一网段,其中一个设备就是联通不了,后来仔细查看了网络设置,发现唯一的区别就是子网掩码不同,一个是255.255.255.0,一个是255.255.0.0,后来将子网统一为255 .255.255.0就都没有问题了。
4、POSMV输出姿态加速度的问题
HYDRINS加速度输出,按照seatex格式输出,但是POSMV不知道哪个是,后来问了张工才知道是group102.
由于前期任务较重,为了赶工期,调查设备一些小问题就凑合着,3月份出航,时间较为宽裕,就好好解决一下,主要问题是:
1、 滑轮计数器连接接头的问题
滑轮计数器接头由于连接问题,多次破断,室外端由于接触不良的问题,有时连接不通的问题,购买新的接头,按照之前的线顺序,重新接线,室外端加防水胶带。
2、Klein4000的连接问题
Klein4000拖鱼和主缆连接有破损,加固以后,发现连接不通,怀疑刚才加固时,造成线缆不通,意思就是说,线缆可能已经断了,通过万用表,逐段排查,发现确实是刚才加固区的问题,破开以后,线缆已断,于是重新连线,故障排除。
Klein4000的主机,插上电源以后,PWR灯闪烁,而Klein3000是常亮,Klein4000闪烁表示给拖鱼加电,T/F蓝灯常亮,然后LOSS LOCK红灯熄灭,PWR变常亮,表示电力和通讯正常。