
最近航天十三所的李博士(SAG重力仪的首席)来单位做SAG重力仪的原理和操作培训,在原理讲解的时候,她说了一个重要的算法就是卡尔曼滤波,我知道卡尔曼滤波的大概原理就是:通过初始值、协方差阵和观测值,获取下一时刻的最优值。
观测值就是:GPS,三个方向的重力加速度,三个姿态角加速度
初始值:初始的重力值
通过GPS的位置获取协方差阵
关于初始值获取,平台式和捷联式重力仪都需要通过码头靠泊实现,平台式重力仪比如GT通过平台的加持,比较容易获取重力值;而SAG的重力仪没有平台,它是通过XY平面的重力值为0获取初始重力值,即可以这样理解,它是通过计算获取虚拟平面。
目前通过与同级别重力仪的比对,SAG重力仪通过纯计算的方法,比同级的平台式重力仪比如DGS,KSS以及L&R获取更优的结果,说明我们的算法非常的厉害。
由SAG重力仪的弯道超车,我想起来多波束以及声纳的事情。
比如kongsberg多波束的波束形成质量非常好,主要原因就是:
(1)发射波束比较窄的主要是通过硬件来实现,这个目前国内能够做到
(2)波束指向性(聚焦)比较好,就是相位叠加算法做得比较好
(3)底跟踪检测算法可靠,但地质比较软的时候,仍然有kongsberg梗的问题
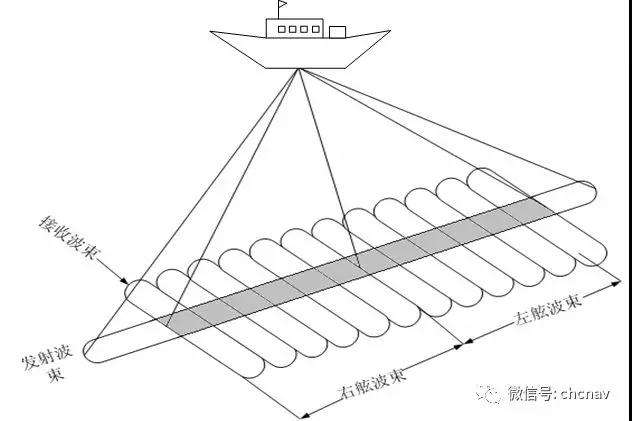
波束形成主要是算法问题,波束聚焦(旁瓣的压制)也是通过算法实现的,每个基元收到的波形,通过一定的延迟叠加获取某个方向的水深,首先需要消除波形的噪声,然后将延迟的相位进行叠加,得到某个方向的水深值。
延迟时间=基元间距*sin角度/换能器处声速
市面上的国产多波束有1个问题就是边缘波束跳跃比较厉害,平坦海底表现尤其明显,原因可能是:噪声消除,相位叠加算法和底检测算法某些地方有所欠缺。
合成孔径声纳可以看成是侧扫声纳的升级技术,一是发射频率更低,可以到10kHz,穿透更强,二是可以获取很高的分辨率,但是它的限制就是对船舶驾驶要求比较高,即航线要直。合成孔径其实也是一种算法。
不知最近军事上大热的有源相阵控技术是不是采用这种办法。
