
最近单位送星站差分去强检,发现鉴定结果不如沿岸信标,而且超限,怀疑鉴定单位没有考虑坐标系统的差别,比如NavComSF3050的坐标系统采用ITRF2008下的WGS84坐标,这个坐标随时间是变化的,而我国的CGCS2000坐标是静态坐标系统,坐标历元是2000年,这样两个坐标存在一个历元差。于是,将我们自检的报告发给了鉴定单位,自检报告如下:
为确保GPS定位系统处于良好的工作状态,掌握GPS的定位精度是否能达到仪器标称的定位精度,2017年3月8日~9日,于青岛科考基地码头对NavCom SF3050 GPS接收机进行稳定性和准确性检查。
1.简介
NavCom SF-3050是一款高性能GPS/GLONASS/Galileo三合一组合导航定位系统,单台设备就可在世界范围内达到实时分米级定位精度,它的主要技术参数和性能指标如下:
Ø 全视野并行66通道
Ø SBAS (WAAS/EGNOS/MSAS/GAGAN)
Ø 集成StarFire接收机
Ø L1,L2,L5,G1&G2全波段载波相位跟踪
Ø C/A,P1,P2,L2C,L5,G1&G2码跟踪
性能参数:
速度:0.01m/s
实时StarFire差分精度(RMS):
水平< 15cm
垂直< 30cm
2.实验工具
Ø 中海达华星A10定位仪
Ø RTK 定位精度:平面 (10+1×10-6D)mm,高程:(20+1×10-6D)mm
Ø HYPACK定位数据采集软件
Ø SDCORS系统网络RTK,精度优于3cm
Ø 三角架及底座各1个
3.测量依据
1)坐标系统及投影参数
Ø 2000国家大地坐标系(CGCS2000)
Ø 2008国际地球参考框架(ITRF2008)
Ø 投影参数:
投影类型:高斯-克吕格投影
中央经线:120º 伪东值:500000m
2)规范及规程
《水运工程测量规范》JTS 131-2012
4.实验步骤
1)布设和测量基准点
在青岛科考基地码头布设基准点,在其上架设三角架,放置华星A10的天线,利用SDCORS测量出基准点的CGCS2000坐标,共观测129组数据(见附录1),点位精度为0.004m,平均值即基准点的CGCS2000坐标见表4-1所示。

图4-1 基准点坐标测量
表4-1 基准点坐标(CGCS2000)
|
点名 |
北坐标m |
东坐标m |
纬度 |
经度 |
|
基准点 |
3996202.464 |
547390.984 |
36°05′41.68819″ |
120°31′34. 46239″ |
2)NavCom SF3050的24小时观测
将NavCom SF3050的天线替换华星A10的天线,利用HYPACK软件采集NavCom输出的定位系信息(NEMA-GGA格式),采集时间为2017年3月8日11点至3月9日14点,总共采集了79543组数据,观测图见图4-2。

图4-2 SF3050测量
观测期间的卫星数和水平精度因子HDOP的情况见图4-3和4-4所示,其中,卫星数和HDOP的平均值分别为15和0.8。
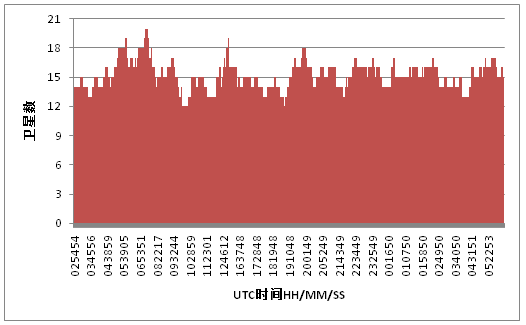
图4-3 卫星数
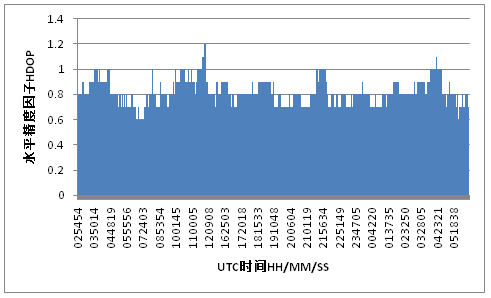
图4-4水平精度因子(HDOP)
观测值的平均值见表4-2。
表4-2 NavCom观测坐标(ITRF2008)
|
点名 |
北坐标m |
东坐标m |
纬度 |
经度 |
|
基准点 |
3996202.239 |
547391.544 |
36°05′41.68079″ |
120°31′34.48472″ |
将观测值展到以平均值为中心的误差圆上,见图4-5,从图中可以看出,观测值都位于以平均值为中心半径为0.30m的圆中,通过统计和计算得出:
Ø 距圆心小于0.15m的观测值的个数为74956,占94.2%
Ø 距圆心0.15m-0.30m的观测值的个数为4587,占5.8%
Ø 观测值的点位中误差为0.076m
与设备的性能描述相符合,稳定性满足专项的要求。
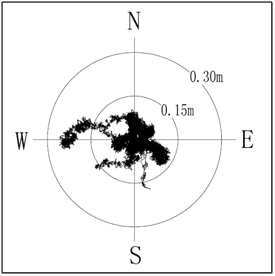
图4-5 点位误差圆
3)定位准确度评估
由于NavCom输出的坐标是ITRF2008下的,而CGCS2000对准的是ITRF1997(2000.0),因此两个坐标需要进行框架和历元的转换,因框架的差别较小,主要进行历元的转换。历元转换公式如下:
X(t)=X(t0)+V(t0)(t-t0)
式中,X(t)是任意历元t时的坐标x、y、z;X(t0)为参考历元t0时的坐标x、y、z;V(t0)为参考历元t0时的速度。
中国大陆的速度场略图见图4-4所示,取BJFS(ITRF2008)的速度(-0.0312,-0.0058,-0.0067)m/a为V(t0)。
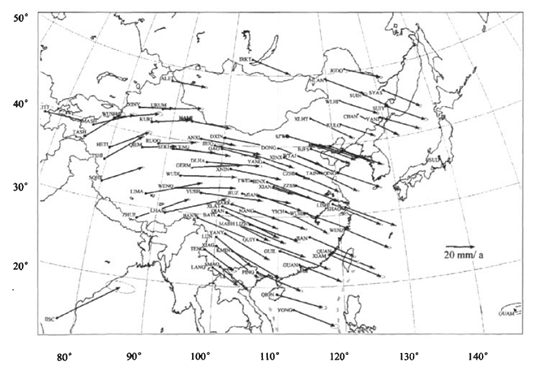
图4-4 中国大陆速度场略图
计算NavCom的观测值(ITRF2008,2017.167)转换成CGCS2000的转换三参数为(0.0312,0.0058,0.0067)m/a×17.167a=(0.5356,0.0996,0.1150)m, 经过坐标转换,得到NavCom观测值的CGCS2000坐标,见表4-3。
表4-3 NavCom观测坐标(CGCS2000)
|
点名 |
北坐标m |
东坐标m |
纬度 |
经度 |
|
基准点 |
3996202.439 |
547391.031 |
36°05′41.68737″ |
120°31′34. 46425″ |
最后得出,NavCom观测值与基准点的坐标差值,见表4-4,点位中误差为0.053m。由此可见,NavCom观测的准确度符合专项要求。
表4-4 NavCom观测值与基准点坐标对比
|
点名 |
北坐标m |
东坐标m |
纬度 |
经度 |
|
基准点 |
3996202.464 |
547390.984 |
36°05′41.68819″ |
120°31′34. 46239″ |
|
观测值 |
3996202.439 |
547391.031 |
36°05′41.68737″ |
120°31′34. 46425″ |
|
差值 |
-0.025 |
0.047 |
|
|
NavCom稳定性和准确度符合设备性能指标,也满足规范的定位要求。