
1、首先讲一下作业顺序:
1)布放和操作遥控器充电
将携带的发电机发动起来,将无人船的开关打到“岸电”,给UPS充电,将底层电源开关打开,遥控器就可以与无人船进行连接了
MBR和无人船显控打开,连接好,将MBR天线搬至高处
将多波束采线控打开,加入到MBR的第三方
2)用遥控打开UPS,注意有延迟,约3分钟;关闭UPS也有延迟3分钟,也可在中舱手动打开UPS
3)过5-10分钟,启动无人船导航软件,左上角两个图标由红变绿,正常
4)给sonar主机加电,多波束-侧扫 oFF改成ON
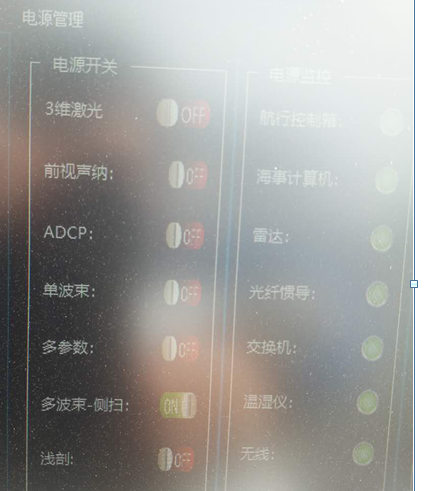
5)检查激光雷达是否打开
如果没打开,就没有激光面板,只有AIS和雷达
6) 吊装到水面

7)吊船至海中,固定住船头和船尾。在不脱钩的状态下用遥控器启动发电机、发动机,观察各设备和倒斗油门是否正常。
2、先启动发电机,再启动主机,标志就是:发电机和主机的冷却水喷口出水

3、使用布放遥控器将对接按钮向下拨,使艇脱钩并迅速将重锤吊离。抽离布放绳子将艇驶离母船。
4个按钮,第2个按钮“对接”是控制落锤的抱紧和松开 向上是落锤抱紧,向下时落锤松开
可以先掰好,再进行吊装尝试;落锤时,等吊带松弛了以后上掰

4、远程登录声纳主机,启动多波束和声纳软件
多波束声纳的预设水深比工作水域水深大5-10m;侧扫声纳的量程设置为工作水域的水深的6-8倍
5、多波束界面:

1)输入预设水深。预设水深应比用户预知的待测水深略大。建议以5m为单位设置,例如水深大致为8m,用户可设为10m。
2)设置水下模式(可选)。用户可根据使用需求决定是否设置水下模式,如果在岸上测试则不设置,探头入水则可设置。
3)配置参数。按照用户模式配置参数。
4)配置传感器。打开传感器串口界面,配置惯导和GPS的端口号,并打开串口。
5)点击启动按键。
存储目录 S7k是水深数据 RawData是原始数据,数据量大需要删除
6、侧扫声纳界面:
侧扫声纳步骤与多波束类似:
1)配置量程
2)设置水下/水下模式,水上模式可以检查设备是否正常
3)下传参数
4)配置GPS串口号并打开串口
5)启动
6)查看状态,在软件底部
状态信息栏位于软件底部。
帧号为当前读取数据的帧号,包数为当前读取帧号数据的包数;
导航以及经纬度等数值在连入GPS或惯导之后有相应信息显示。

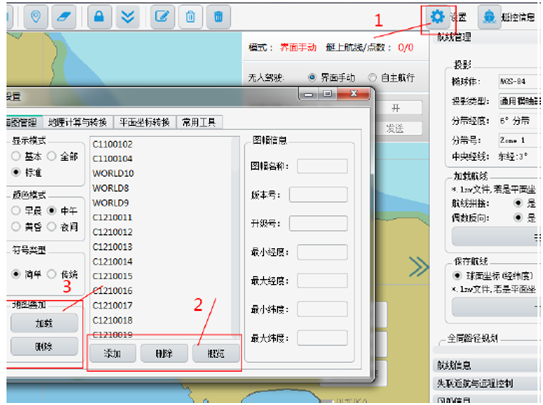
7、无人艇电脑端操作
遥控模式权限最高,当遥控设置为上层模式,交给电脑控制
将模式设置为自主模式
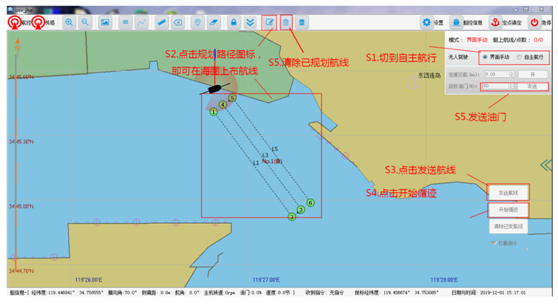
第一步:切换到自主航行模式;
第二步:点击规划路径图标,在海图上任意位置规划航线,用于无人艇循迹;
第三步:点击发送航线,即将航线发送至无人艇上;
第四步:点击开始循迹,此时若已设置一定油门,无人艇开始运动,一定注意观察无人艇是否按照航线运动,如出现异常,再次点击该按钮,即可停船。 第五步:设置油门值,并发送。无人艇首次上电或重启时,油门值默认为0,需要设置油门(0~100,最好不要超过80,观察转速和航速是否满足要求),后续循迹时该油门一直保持设定值,无需每次循迹都要设置。
1)每次只能使用一条航迹,因此,只能将HYPACK布置好的测线文件作为背景,然后现场做航迹,一条一条的跑
背景文件的制作和使用:
2)导航软件软件支持UTM和高斯投影,先在HYPACK设置一个导航软件的支持的带,然后布好测线,保存为lnw文件
导航软件进行加载
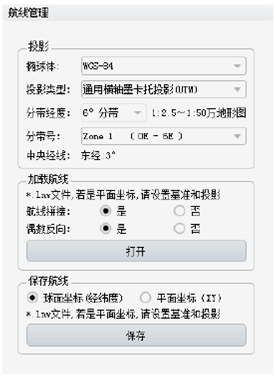
3)打开,就会在导航界面显示,然后保存(一定要选经纬度坐标,背景加载只支持经纬度坐标)
在设置中的海图管理,加载保存的文件,即可作为背景文件
8、结束工作的顺序
1)将这两个软件进行最小化,就可以不占用无线带宽,启动以后,就开始记录了
2)测量结束,关闭2个软件的发射
3)船到岸边或母船边以后,关闭主机和发电机,一旦吊起,没有冷却水,会损坏主机和发电机
4)落锤,吊装,船需要正好安装在铁架上
5)无人船接岸电,用网线直连sonar主机,拷贝数据
6)用遥控器关闭UPS,开关调到关,底层开关关闭
9、遇到的问题:
1、 无人船在岸上的时候,我的电脑不能远程桌面sonar主机
检查了MBR的第三方连接管理,我的电脑已经加入了,突然想起来,sonar的网线昨天被我拔掉了
远程桌面有时无法连接,重启电脑就可以,怀疑是远程连接没有正常关闭,后来尝试了一下正式关闭,可以重新连接,不用重启电脑
2、 sonar主机每次重启的时候,都要进行时间同步,因为如果不同步,默认是上次使用的时间
3.遥控可以控制无人船,正常转向,加速,倒车都正常,但是电脑端不能进行:
发送油门信息,但是主机并没有反应,转速一直处于怠速(700-800)
可以发送航迹,也可以循航迹,但是由于由于没有动力,不能循航迹
最后船都飘好远,超过800m了,赶紧带着遥控器离船近点,慢慢地将其遥控回来,否则得租船把它拖回来
与厂家远程微信也不能解决,他们明天过来维修