
此文由站长的同事Lei 提供,由xiaokcehui编辑.
单位新购置的无人机,找了一块地方进行验收。
1、无人机简介
型号是CW-10,为小型全电动垂直起降固定翼无人机,翼展2.6m,机身长1.6m,任务载荷1~2kg,续航时间约90分钟,巡航速度约20m/s,抗风能力为6级风。数据处理系统软件名称为Trimble Business Center。

2 、验收测量
A)申请空域
验收测量前,已按规定向有关部门申请了空域使用许可。许可时间为测量当天12:00至14:00。
B)布设像控点
面积为0.96km2,于岛上布设9个像控点。


C)架设地面站,规划航线及参数设置
将地面站架设在小麦岛外地形空旷区域,利用地面站控制软件进行任务航线规划、起降航线规划、控制参数设置、航拍参数设置等操作。
D)飞行测量
无人机设置完毕后,对飞机进行了飞前检查,检查内容包括飞机各部件组装情况、电池电量情况、遥控器状态、IMU状态、相机状态、磁罗盘稳定性、航线高度检验、空速传感器状态、舵面及电机状态等。检查通过后,对小麦岛全岛进行了航测。
3、数据处理
采用Trimble Business Center(TBC)处理, UASMaster是TBC PM的一部分,可将无人机数据导入TBC进行PPK处理,然后导出UASMaster进行空三处理,成果再导入TBC进行高级应用。现利用Trimble Business Center软件的UASMaster模块,对无人机外业测量获取的照片及相关POS数据进行处理。
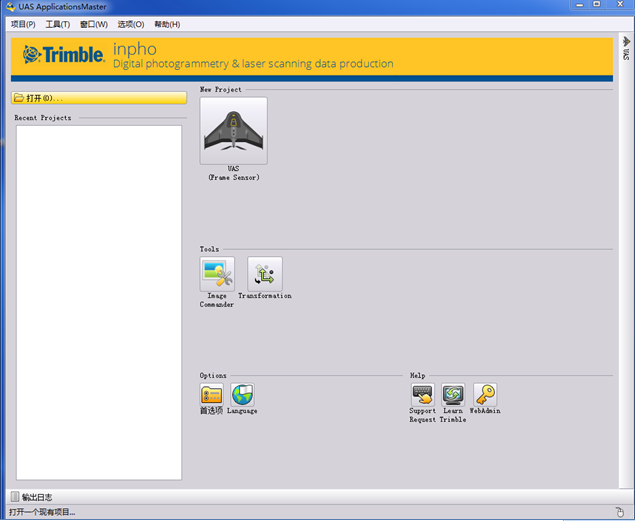
A)新建项目
打开UASMaster模块主界面,新建一个工程项目,并设置相关参数如项目路径、坐标系等。
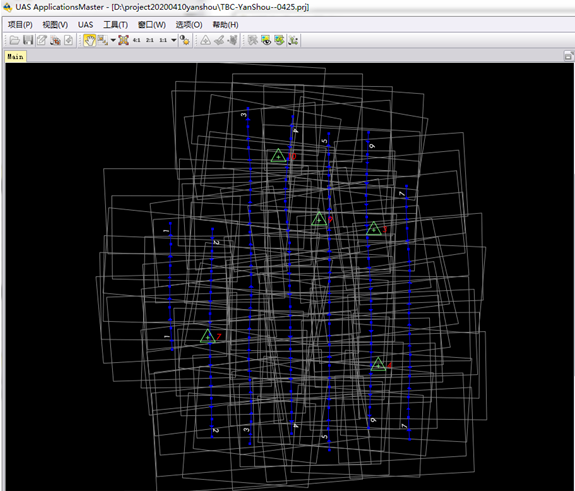
B)项目编辑
进入项目编辑器,进行项目相关参数设置并导入数据等操作,主要包括:摄影机/传感器参数设置、航摄像片导入、GNSS/IMU数据导入、控制点/检查点数据导入、航条生成等。
本项目共导入像片95张、POS数据95组、控制点5个、检查点4个。
C)地理参照
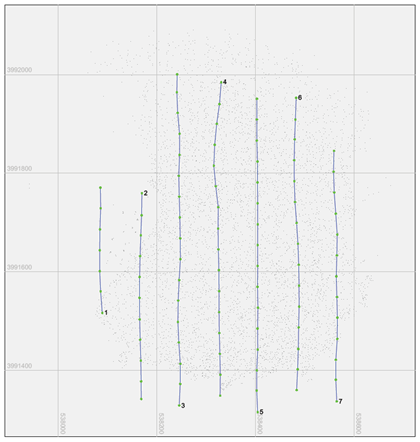
完成项目编辑后,对像片进行地理参照处理,包括连接点的提取和平差、控制点/检查点的数字化、像片外方位定向等。
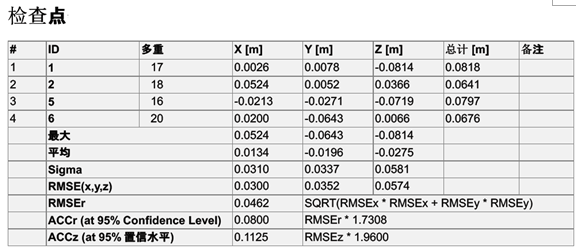
本项目共提取到5598个连接点,95组图形数据,选用了5个控制点和4个检查点。地面点标准差为X=0.0185m、Y=0.0156m、Z=0.0626m,检查点中误差为X=0.0300m、Y=0.0352m、Z=0.0574m,能够满足1:2000的地形测图规范要求,达到了预期精度指标。
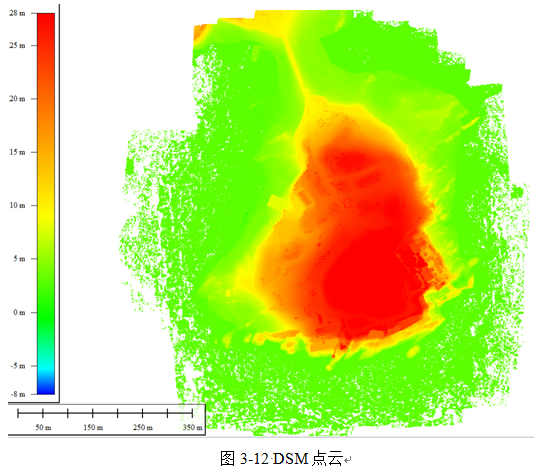
D)生成真射影像图
生成DSM点云并对噪声点进行编辑,然后生成项目区域的真正射影像。

4、总结
对于检查点的精度是否符合要求,查了一下规范,看了2个规范:
1)GB-T15967-20081:5001:10001:2000地形图航空摄影测量数字化测图规范
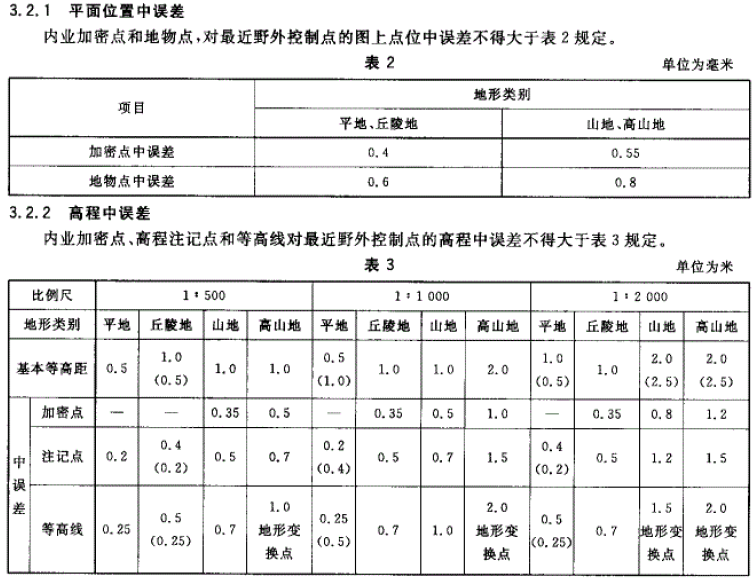
2)GB 17501-2017 海洋工程地形测量规范
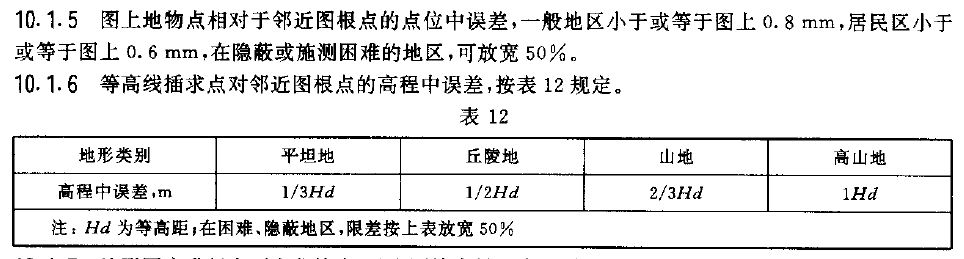
从检查点的平面中误差小于5cm,高程中误差小于10cm,满足规范1:500的测图要求。如果再测一些地物特征点,参与误差统计更能全面反映本次无人机测量的精度了。